Incremental Encoder Signal Converter | FUTEK
What are the functions of an Incremental Encoder Signal Converter?
An Incremental encoder is an electro-mechanical device that converts angular motion or relative position of a shaft into digital or pulse signals by employing an optical disk. Incremental encoders can be used in positioning and motor speed feedback applications. See below for more information about how incremental encoders work.
An Incremental Encoder Signal Converter converts the pulses from an incremental encoder into analog or digital formats. It is an essential device for reading and processing the output from the encoder.
FUTEK’s USB520 Incremental Encoder Signal Converter is able to process quadrature leading and lagging pulses, with speed measurement up to 150,000 pulses per second and angle measurement up to 10,000 pulses per rotation. The encoder data is read up to 10 Hz, or 10 samples per second.
Additionally, signal converters (aka amplifiers), modulate electrical signals and are capable of performing the following signal conditioning steps:
Excitation Voltage
Some sensors require an excitation voltage to feed the Wheatstone bridge and generate their output signal as a ratio of the input excitation voltage. Thus, you need to establish if your DAQ or PLC can support the sensor’s input voltage or excitation voltage requirements. Simply put, an unstable excitation voltage input leads to an unstable sensor output. In case you need an amplifier module for PLC or DAQ and they do not provide a stable input excitation voltage, the amplifier will be the excitation voltage source to ensure the sensor provides a reliable and consistent output signal.
Filtering
Analog sensor signals are susceptible to electrical noise and/or residual ripple voltage, which can distort or skew measurements. Noise needs to be filtered out before you can capture an accurate signal. DAQs and PLCs designed to interface directly with full-bridge sensors will include pass band and other forms of signal conditioning and filtration. In a low noise signal conditioner, electronic filters eliminate some effects on accuracy by removing electrical noise and ripple effect above and below the analog sensor’s signal range, resulting in a high signal-to-noise ratio.
Amplification
Sensors can output a signal in the nanovolt through millivolt range. When your DAQ or PLC is limited to measuring volts, you will need an amplifier to convert millivolts to a larger signal. Some PLCs and DAQs come with built-in amplification; others will require an external amplifier. What if your existing DAQ or PLC does not provide built-in amplification, signal conditioning, and a stable power source for sensor excitation? In that case, you will need an amplifier to fill in the shortfalls in your instrumentation.
The USB integration works hand in hand with SENSIT Test and Measurement software, which allows users to monitor the actual output of the sensor in real-time. FUTEK developed DLL Libraries to allow USB520 to also work with other software such as LabView® and Visual Studio.
USB520 Features
- Supports Encoder Input: Quadrature Leading and Lagging Pulse
- USB 2.0 Communication Link;
- USB Bus-Powered (5V);
- Input/Output Short Circuit Protection;
- Streaming ASCII Output;
- Offered with DLL/Mac Dynamic Library;
- CE Approved Class A (required for Medical and Aerospace applications);
- Industrial metallic enclosure;
- Integrated DIN rail mount;
- Supports, VDC, mA, mV and TTL type input.
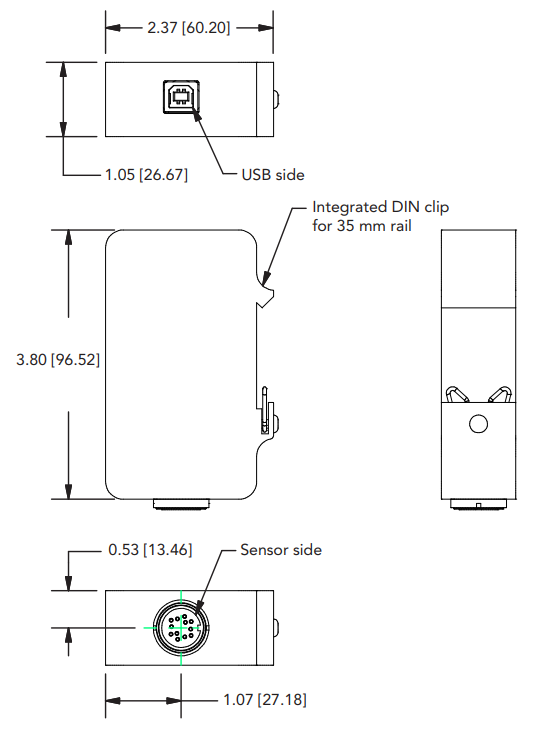
Dimensions
Specifications
| GENERAL | |
|---|---|
| Sampling Rate | Up to 4800 SPS |
| Bandwidth (Hz) | Sampling Rate (SPS) / 4 |
| Internal Resolution | 24 bits |
| Resolution (Noise Free) | See Chart on Page 3 |
| Non Linearity (max) | ± 0.005% of FSR |
| Output | Digital Packetized Data |
| Integrated Digital Filter | 50 Hz/60 Hz Rejection (100 dB) |
| On Chip Memory | 1 Kilobyte |
| Stored Calibration | Up to 16 Points |
| Weight | 0.43 lb (195 g) |
| On Chip Sensor Profiles | Up to 4 |
| ASCII Output Update Rate | 10 SPS |
| IP Rating | IP50 |
| ENCODER INPUT | |
| Encoder Input | Quadrature Leading and Lagging Pulse (TTL type) |
| Speed Measurement | Up to 150k Pulses Per Second¹ |
| Angle Measurement (α) | Up to 10k Pulses Per Rotation (PPR)¹ |
| Angle/Speed Measurement (Update Rate) | 100 ms |
| STRAIN GAUGE mV/V INPUT | |
| Bridge Excitation | 4.6 VDC |
| Standard Input Range | ± 3.4 mV/V (factory default) |
| Optional Input Range | Up to ± 400 mV/V |
| Min. Bridge Resistance | 50 Ohm |
| Max. Bridge Resistance | 5000 Ohm |
| VOLTAGE INPUT | |
| Supply Voltage | Selectable 5,9,10,12,15,18,20,24 VDC/1W |
| Standard Input Range | ± 10 VDC (Factory Default) |
| CURRENT INPUT | |
| Supply Voltage | Selectable 5,9,10,12,15,18,20,24 VDC/1W |
| Standard Input Range | 0-20 mA (Factory Default) |
| CONNECTORS | |
| Sensor Connector | Binder 09 0132 90 12 |
| Mating Connector | Binder 99 5129 00 12 |
| USB 2.0 Connector | Type B |
| ¹ Speed = ∆ α × 60 / PPR | |
| ENVIRONMENT | |
| Operating Temperature | -13°F to 185°F [-25°C to 85°C] |
| Storage Temperature | -40°F to 257°F [-40°C to 125°C] |
| CONFORMITY | |
| RoHS | 2011/65/EU |
| CE | EN61326-1:2013; EN55011:2009 (Amended by A1:2010) |
| SAMPLES PER SECOND (SPS) | mV/V RESOLUTION | mA AND VDC INPUT RESOLUTION |
|---|---|---|
| 5 | 18 | 20.5 |
| 50 | 16.5 | 19.5 |
| 100 | 16.3 | 19.2 |
| 300 | 15.8 | 18.2 |
| 1200 | 14.6 | 17.0 |
| 2400 | 13.6 | 16.0 |
| 4800 | 13.6 | 16.0 |
What is an Incremental Encoder?
An Incremental encoder is an electro-mechanical device that converts the angular motion or relative position of a shaft into digital or pulse signals employing an optical disk. Incremental encoders are commonly used in rotary encoders.
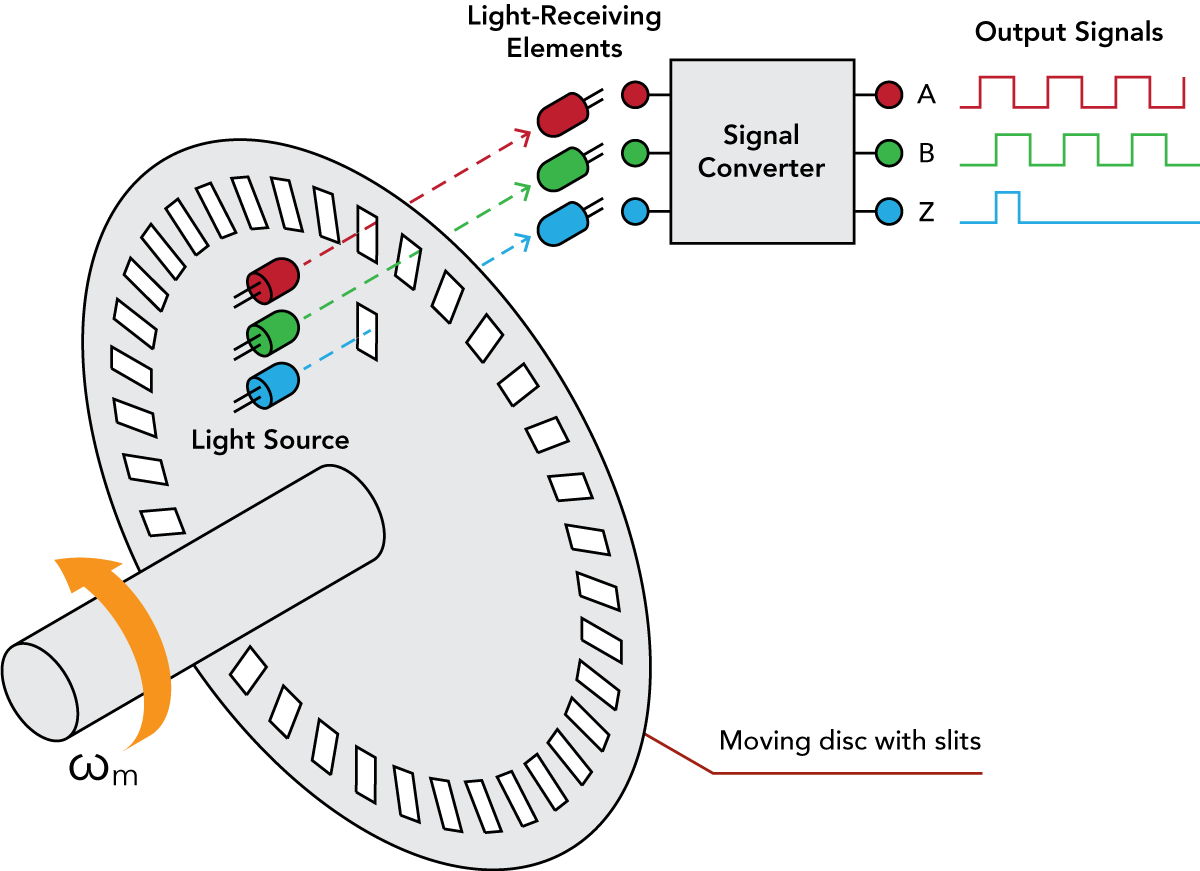
This device consists of a rotating disk, a light-emitting source, and light-receiving elements (photosensor). The disk, which is mounted on the rotating shaft, has patterns of opaque and transparent sectors coded into the disk. As the disk rotates, these patterns block the light emitted onto the photodetector, generating a digital or pulse signal output, also known as quadrature pulse signal.
Incremental encoders provide rotational or angular speed. They can measure the change in position, but not the absolute position of the shaft. Since there are few constructive elements involved, it is a relatively simple and inexpensive transducer.
Commonly, the incremental encoder uses two output channels (A and B) to detect angular position. Using two code tracks with sectors positioned 90° out of phase, the two output channels of the quadrature encoder indicate both position and direction of rotation. If A leads B, for example, the disk is rotating in a clockwise direction (i.e. quadrature leading pulse). If B leads A, then the disk is rotating in a counter-clockwise direction (i.e. quadrature lagging pulse). Therefore, by monitoring both the number of pulses and the relative phase of signals A and B, you can track both the relative position and direction of rotation.
Advantages of Incremental Encoders
- Typically lower cost relative to absolute encoders;
- Good for simple pulse counting or frequency monitoring applications such as speed, direction, and position monitoring;
- Less complex than absolute encoders;
- High noise immunity.