What is cogging torque in electrical motors?
Dynamic cogging torque is a type of torque that occurs in certain types of electric motors when they are stationary or rotating at very low speeds. It is caused by the interaction between the permanent magnets in the motor and the stator windings.
In an electric motor, the stator is the stationary part of the motor that houses the windings, and the rotor is the rotating part of the motor that is attached to the output shaft. When the motor is stationary, the magnets in the rotor are aligned with the stator windings, and this alignment creates a small amount of torque that resists the rotation of the rotor. This torque is known as dynamic cogging torque.
Dynamic cogging torque can be a problem in some applications because it can make it impede starting the motor or controlling its speed accurately at low speeds. Engineers can design motors that minimize dynamic cogging torque, but it is generally not possible to completely eliminate it.
How to measure cogging torque using rotary torque sensors?
Torque sensors are an essential tool for cogging torque measurement in electric motors. They allow engineers to accurately and precisely measure the torque required to rotate the motor at different speeds and under different load conditions. This information is important for understanding the performance of the motor and for designing systems that use the motor.
There are several ways to use rotary torque sensors to measure cogging torque in an electric motor:
- Mounting the torque sensor on the output shaft of the motor and use it to measure the torque required to rotate the shaft. This method can be used to measure both dynamic and static cogging torque.
- Using a torque sensor to measure the torque required to accelerate the motor from a stationary position. This method can be used to measure dynamic cogging torque, but not static cogging torque.
- Using a torque sensor to measure the torque required to maintain a constant rotational speed. This method can be used to measure both dynamic and static cogging torque.
In all of these methods, it is important to carefully control the speed and load on the motor to ensure that accurate measurements are obtained. It may also be necessary to perform multiple measurements at different speeds and loads to get a complete picture of the cogging torque characteristics of the motor.
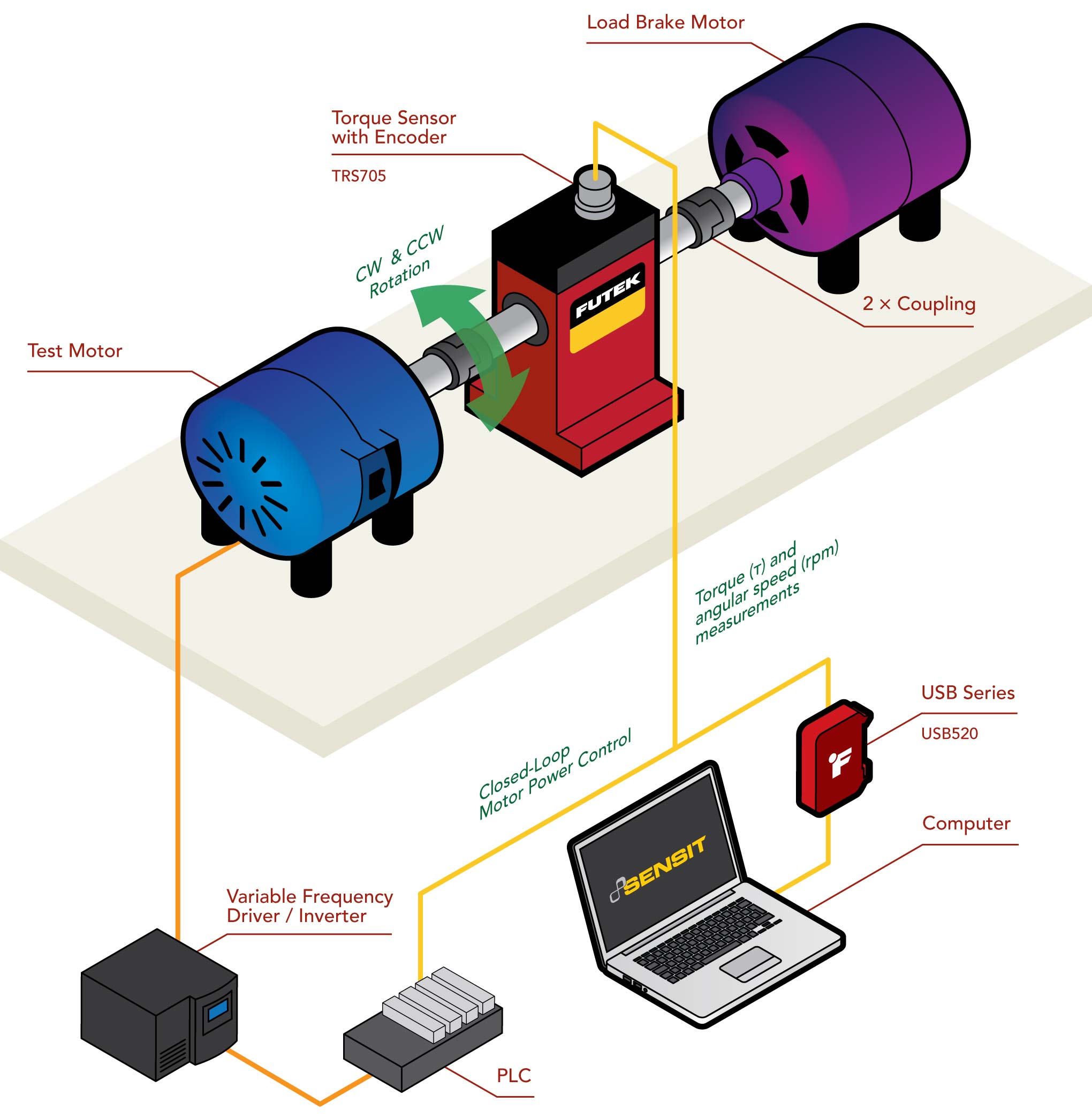
How it Works
First, select a torque sensor with a range that is appropriate for the expected cogging torque of the motor. It is important to choose a torque sensor that is capable of measuring the full range of cogging torque that may be encountered in the application. TRS705 is equipped with encoder and is capable of measure torque range from 1 N.m up to 1000 N.m.
Once the torque sensor is mounted, connect the amplifier or signal conditioner to process the torque sensor output as well the encoder signal. The encoder is used to measure the rotation of the shaft and provides a reference for the torque measurements.
Connect the signal conditioner to a data acquisition system or other device that is capable of recording and analyzing the torque and rotation data. This may involve connecting the sensor and encoder to a computer or other device using a suitable interface such as USB.
The USB520 is the ideal signal conditioner solution for systems that require measurement of rotary torque and encoder readings, such as angle and speed. Its compact and robust design also makes the USB520 fitting for this type of industrial application. The USB520 output can be integrated with a PLC / VFD solution.
Applying FUTEK's SENSIT™ Test and Measurement Software to this test platform will allow the operator to live graph and data log the results.


Contact Us
Please Contact Us with questions.
What is cogging torque in electrical motors?
Dynamic cogging torque is a type of torque that occurs in certain types of electric motors when they are stationary or rotating at very low speeds. It is caused by the interaction between the permanent magnets in the motor and the stator windings.
In an electric motor, the stator is the stationary part of the motor that houses the windings, and the rotor is the rotating part of the motor that is attached to the output shaft. When the motor is stationary, the magnets in the rotor are aligned with the stator windings, and this alignment creates a small amount of torque that resists the rotation of the rotor. This torque is known as dynamic cogging torque.
Dynamic cogging torque can be a problem in some applications because it can make it impede starting the motor or controlling its speed accurately at low speeds. Engineers can design motors that minimize dynamic cogging torque, but it is generally not possible to completely eliminate it.
How to measure cogging torque using rotary torque sensors?
Torque sensors are an essential tool for cogging torque measurement in electric motors. They allow engineers to accurately and precisely measure the torque required to rotate the motor at different speeds and under different load conditions. This information is important for understanding the performance of the motor and for designing systems that use the motor.
There are several ways to use rotary torque sensors to measure cogging torque in an electric motor:
- Mounting the torque sensor on the output shaft of the motor and use it to measure the torque required to rotate the shaft. This method can be used to measure both dynamic and static cogging torque.
- Using a torque sensor to measure the torque required to accelerate the motor from a stationary position. This method can be used to measure dynamic cogging torque, but not static cogging torque.
- Using a torque sensor to measure the torque required to maintain a constant rotational speed. This method can be used to measure both dynamic and static cogging torque.
In all of these methods, it is important to carefully control the speed and load on the motor to ensure that accurate measurements are obtained. It may also be necessary to perform multiple measurements at different speeds and loads to get a complete picture of the cogging torque characteristics of the motor.