How can FUTEK’s force-sensing solution improve haptic feedback?
In laparoscopic surgery, grasping instruments are the only source of force feedback to the surgeon. Because of the tool’s lack of haptic perception and communication, surgeons may cause tissue damage by using incorrect laparoscopic pinch force control and unpredictable tissue and grasper properties may cause slips or ruptures. This article on haptic feedback robotic surgery presents a thorough review of the topic.
To overcome this challenge a miniature force sensing solution can be installed inline with the control wires, creating a haptic feedback control system for the endoscope that helps:
- Influencing the surgeon’s ability to generate a safe laparoscopic grasp while pulling and manipulating tissues of variable stiffness.
- Improving the surgeon’s ability to sense tissue consistency, arterial pulse detection, and force control during surgical procedures.
Force Feedback Sensors Design Challenges
Engineers and surgeons face important issues that require consideration before the design of laparoscopic grasper with force perception. The design and manufacture of a haptic feedback sensor for robotic surgery instruments entail two distinct but complementary challenges:
Overcoming technical obstacles of designing a sensor for intra- abdominal force measurement:
- Size restrictions - miniaturization
- Biocompatibility
- Autoclavability
- Hermeticity
- Reusability
Maintaining the minimally required specification of a high-grade force measurement solution:
- Nonlinearity
- Hysteresis,
- Repeatability,
- Cross-talk
- Bandwidth
- Noise-free resolution
Why FUTEK NanoSensors are up to the challenge
The FUTEK’s NanoSensor was engineered with all these design constraints in mind. It was also developed with a Design for Manufacturability (DFM) approach.
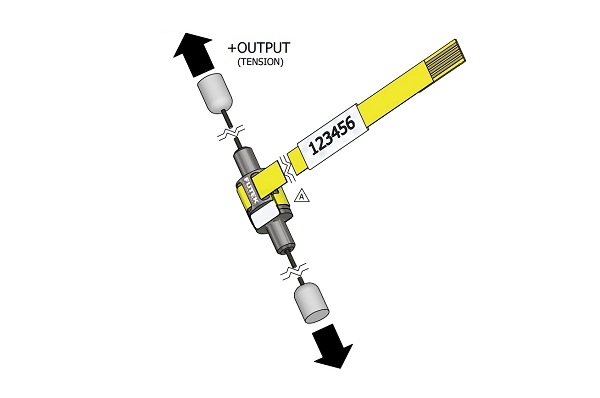
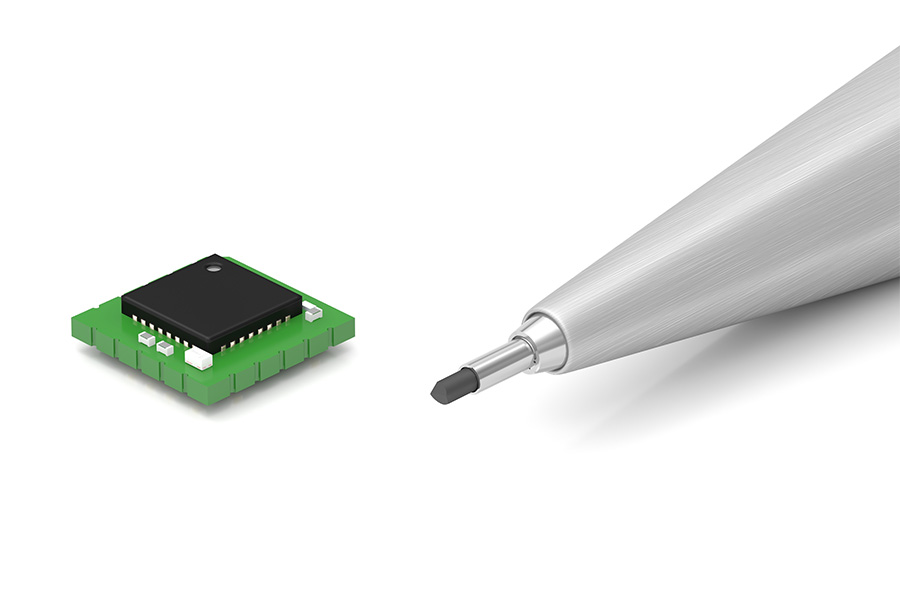
QLA414 NanoSensor is the smallest tension and compression force measurement solution of its kind (micro-miniature in-line load cell). The 4mm x 5mm NANO sensor, opens up a world of possibilities for robotic surgery due to its minuscule size, ability to measure both tension and compression, and unique mounting flexibility.
QLA414 Features
- M1 threaded double-sided mounting provisions;
- 1000 Ohm full-bridge side load (off axis or extraneous loads) compensated instrumentation;
- Laser-welded construction;
- Non-active interconnect;
- Environmental protection;
- ±0.5% nonlinearity of rated output (RO) in 5lb and 10lb capacities - high precision force measurement applications;
- Up to 200% safe overload;
- Tension and compression force sensor;
- Ultra-low deflection (0.0002” [0.005 mm]);
- High natural frequency response.
Additionally, force sensors as small as 3mm x 4mm with force measurement capabilities up to 50lb, are also available for OEM applications, including IP67 and autoclavable sensors for the medical industry. Being the ideal miniature load cell for surgical robotics and laparoscopic grasper with force perception, the NANO Force Transducer is well suited for haptics force feedback and catheter ultra-miniature load cell.
FUTEK QIA128 embedded digital signal conditioner
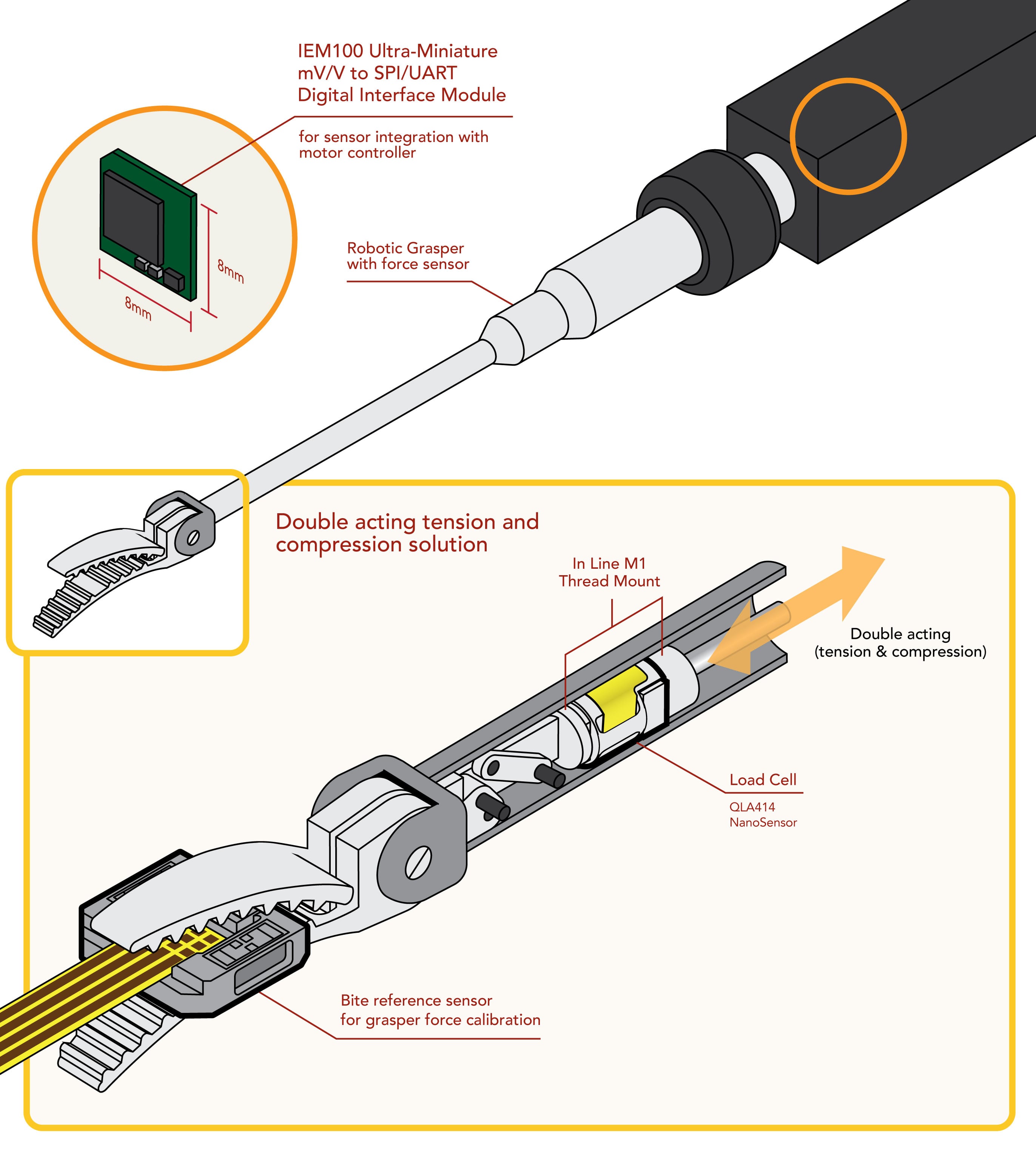
FUTEK QIA128 digital embedded signal conditioner is a miniature ultra low power digital signal conditioner with SPI output. Its miniature board of only 8 mm x 8 mm features a selectable sampling rate from 4 SPS to 1300 SPS to achieve from 11.4 up to 14.2 noise-free resolution (NFR) depending on requirements.
Transducer Calibration Requirements
Given the criticality of surgical instruments, force feedback sensors must offer high accuracy and must undergo a strict regime of in situ calibrations. Depending on the application criticality, the haptic force sensor must be calibrated before each surgical procedure.
Furthermore, engineers must understand the correlation between the inline force applied by the actuator and guidewires to the NanoSensor inside the instrument trocar versus the actual physical grip force at the jaws applied over the tissue.
To address the in situ calibration challenge, FUTEK Micro Engineering team also developed the Bite Reference Sensor to allow for calibration and inspection of the surgical grasper jaws and the actual applied force.
How it Works
Two QLA414 NanoSensor is installed in-line with the axial guide controlling the grasper jaw motion. It measures forces in tension (open jaw) and compression (closed jaw).
As the grasper is in contact with internal tissues during the surgical procedure, the NanoSensor measures the force applied by the grasper.
The force measurement signal is read by QIA128 miniature ultra low power digital signal conditioner with SPI output and can be used for system integration. It enables force feedback in the surgeon's controls (i.e. gimbal).

Contact Us
Please Contact Us with questions.
How can FUTEK’s force-sensing solution improve haptic feedback?
In laparoscopic surgery, grasping instruments are the only source of force feedback to the surgeon. Because of the tool’s lack of haptic perception and communication, surgeons may cause tissue damage by using incorrect laparoscopic pinch force control and unpredictable tissue and grasper properties may cause slips or ruptures. This article on haptic feedback robotic surgery presents a thorough review of the topic.
To overcome this challenge a miniature force sensing solution can be installed inline with the control wires, creating a haptic feedback control system for the endoscope that helps:
- Influencing the surgeon’s ability to generate a safe laparoscopic grasp while pulling and manipulating tissues of variable stiffness.
- Improving the surgeon’s ability to sense tissue consistency, arterial pulse detection, and force control during surgical procedures.
Force Feedback Sensors Design Challenges
Engineers and surgeons face important issues that require consideration before the design of laparoscopic grasper with force perception. The design and manufacture of a haptic feedback sensor for robotic surgery instruments entail two distinct but complementary challenges:
Overcoming technical obstacles of designing a sensor for intra- abdominal force measurement:
- Size restrictions - miniaturization
- Biocompatibility
- Autoclavability
- Hermeticity
- Reusability
Maintaining the minimally required specification of a high-grade force measurement solution:
- Nonlinearity
- Hysteresis,
- Repeatability,
- Cross-talk
- Bandwidth
- Noise-free resolution
Why FUTEK NanoSensors are up to the challenge
The FUTEK’s NanoSensor was engineered with all these design constraints in mind. It was also developed with a Design for Manufacturability (DFM) approach.
QLA414 NanoSensor is the smallest tension and compression force measurement solution of its kind (micro-miniature in-line load cell). The 4mm x 5mm NANO sensor, opens up a world of possibilities for robotic surgery due to its minuscule size, ability to measure both tension and compression, and unique mounting flexibility.
QLA414 Features
- M1 threaded double-sided mounting provisions;
- 1000 Ohm full-bridge side load (off axis or extraneous loads) compensated instrumentation;
- Laser-welded construction;
- Non-active interconnect;
- Environmental protection;
- ±0.5% nonlinearity of rated output (RO) in 5lb and 10lb capacities - high precision force measurement applications;
- Up to 200% safe overload;
- Tension and compression force sensor;
- Ultra-low deflection (0.0002” [0.005 mm]);
- High natural frequency response.
Additionally, force sensors as small as 3mm x 4mm with force measurement capabilities up to 50lb, are also available for OEM applications, including IP67 and autoclavable sensors for the medical industry. Being the ideal miniature load cell for surgical robotics and laparoscopic grasper with force perception, the NANO Force Transducer is well suited for haptics force feedback and catheter ultra-miniature load cell.
FUTEK QIA128 embedded digital signal conditioner
FUTEK QIA128 digital embedded signal conditioner is a miniature ultra low power digital signal conditioner with SPI output. Its miniature board of only 8 mm x 8 mm features a selectable sampling rate from 4 SPS to 1300 SPS to achieve from 11.4 up to 14.2 noise-free resolution (NFR) depending on requirements.
Transducer Calibration Requirements
Given the criticality of surgical instruments, force feedback sensors must offer high accuracy and must undergo a strict regime of in situ calibrations. Depending on the application criticality, the haptic force sensor must be calibrated before each surgical procedure.
Furthermore, engineers must understand the correlation between the inline force applied by the actuator and guidewires to the NanoSensor inside the instrument trocar versus the actual physical grip force at the jaws applied over the tissue.
To address the in situ calibration challenge, FUTEK Micro Engineering team also developed the Bite Reference Sensor to allow for calibration and inspection of the surgical grasper jaws and the actual applied force.