Minimally Invasive Surgery (MIS) and Single Port Access Surgery (SPAS) have dramatically reduced the risk and recovery time for patients for undergoing tumor extraction, heart valve and artery repair, and in-vitro fertilization. Whether performed with a robotic surgical system or with the trained hands of a surgeon, precision instrumentation is required to work with the delicate tissues of the patient while providing a precise, secure grip without exerting excess force.
The forces applied with robotic instrumentation must be calibrated so that visual and haptic feedback mechanisms report the correct applied forces during surgery. Handheld instrumentation requires verification of the applied forces so the tactile sensations felt by the surgeon are predictable and consistent. This application note demonstrates how to use load cells and force sensors for the verification and calibration of the jaws of a laparoscopic instrument.
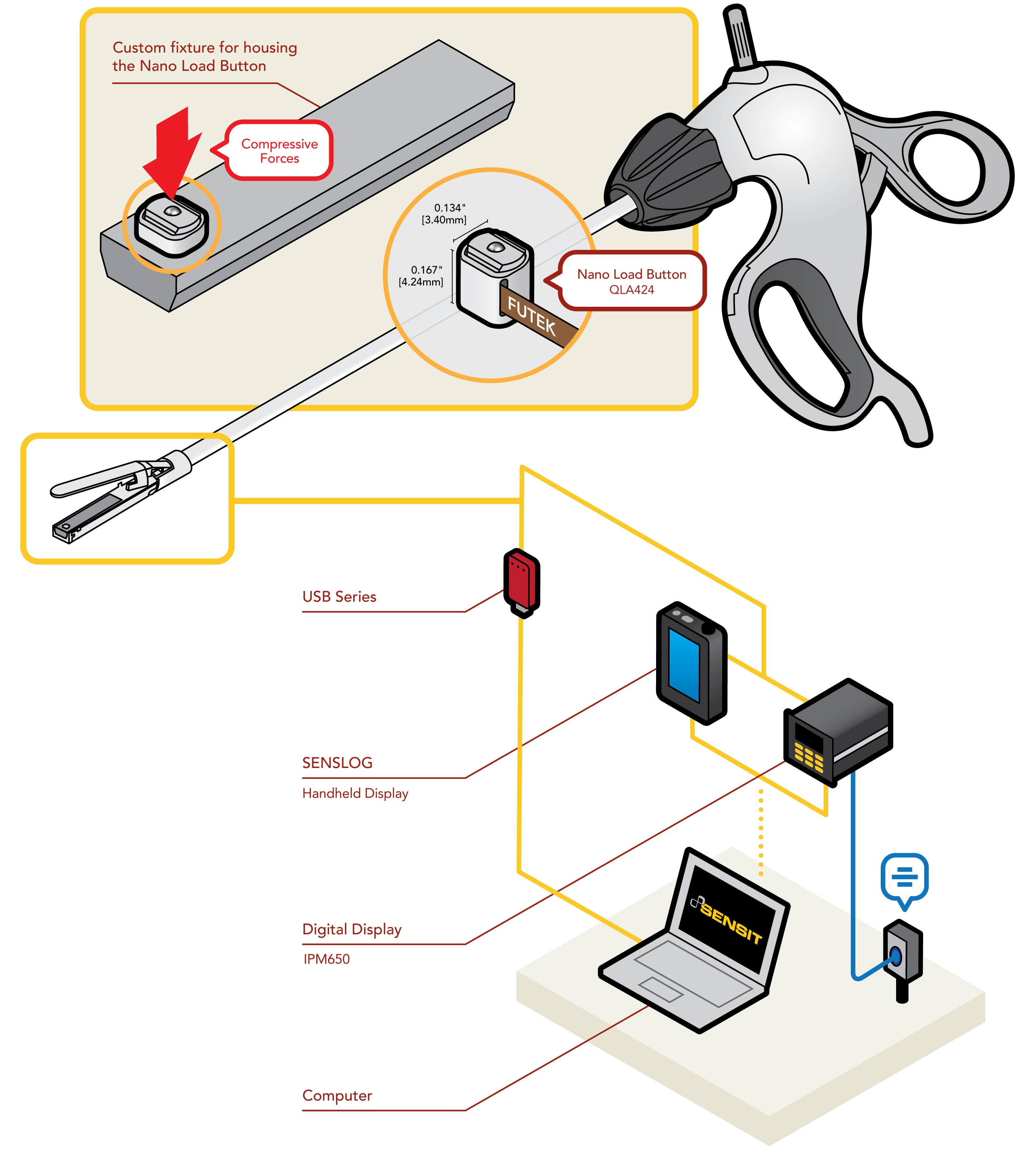
The benefit of using the QLA424 Nano Load Button with a custom fixture is that the fixture perfectly fits into the stapler cartridge, mimicking the jaws' envelope and enhancing force measurement. Additionally, the fixture's geometry is customizable, allowing the end-user to machine whatever geometry fits the stapler jaw envelope.
Nano Load Button Load Cell
QLA424 NANO Load button sensor is the smallest compression force measurement solution of its kind (micro-miniature load button load cell). The 3.9 mm x 4.2 mm NANO sensor, opens up a world of possibilities for industries such as advanced medical laparoscopic and endoscopic instruments and semiconductors, where force sensor size is critical.
The NANO Load Button sensor features a thread mount design as well as a radial flex cable exit allowing for flexible integration options. Nano sensor’s multi element, side load compensated 1000 Ohm full-bridge instrumentation is encased with laser-welded construction with patent-pending non-active interconnect packaging providing environmental protection. It allows for high accuracy in a 30 lb. capacity with ultra-low deflection, and high natural frequency response.
The NANO Load button is compatible with all FUTEK signal conditioners and amplifiers.
How it Works
Load cells enable medical professionals to verify that clamping tools apply the appropriate amount of force before they are used in surgery.
In this application, QLA424 Nano Load Button with a custom fixture is mounted to the grasping tip of a laparoscopic hand instrument. The load cell records force measurements, which can be used to calibrate the tool.
Load feedback can be displayed on either FUTEK’s SENSLOG Handheld Display or IPM650 digital displays, or streamed through USB to a PC. This data can then be examined to determine if the tool is suitable for operation or if it needs to be adjusted.
Pairing the SENSIT™ Test and Measurement Software with any of FUTEK’s instruments provides the user with the ability to data log the measurements and store them for record keeping or calibration history.




Contact Us
Please Contact Us with questions.
Minimally Invasive Surgery (MIS) and Single Port Access Surgery (SPAS) have dramatically reduced the risk and recovery time for patients for undergoing tumor extraction, heart valve and artery repair, and in-vitro fertilization. Whether performed with a robotic surgical system or with the trained hands of a surgeon, precision instrumentation is required to work with the delicate tissues of the patient while providing a precise, secure grip without exerting excess force.
The forces applied with robotic instrumentation must be calibrated so that visual and haptic feedback mechanisms report the correct applied forces during surgery. Handheld instrumentation requires verification of the applied forces so the tactile sensations felt by the surgeon are predictable and consistent. This application note demonstrates how to use load cells and force sensors for the verification and calibration of the jaws of a laparoscopic instrument.
The benefit of using the QLA424 Nano Load Button with a custom fixture is that the fixture perfectly fits into the stapler cartridge, mimicking the jaws' envelope and enhancing force measurement. Additionally, the fixture's geometry is customizable, allowing the end-user to machine whatever geometry fits the stapler jaw envelope.
Nano Load Button Load Cell
QLA424 NANO Load button sensor is the smallest compression force measurement solution of its kind (micro-miniature load button load cell). The 3.9 mm x 4.2 mm NANO sensor, opens up a world of possibilities for industries such as advanced medical laparoscopic and endoscopic instruments and semiconductors, where force sensor size is critical.
The NANO Load Button sensor features a thread mount design as well as a radial flex cable exit allowing for flexible integration options. Nano sensor’s multi element, side load compensated 1000 Ohm full-bridge instrumentation is encased with laser-welded construction with patent-pending non-active interconnect packaging providing environmental protection. It allows for high accuracy in a 30 lb. capacity with ultra-low deflection, and high natural frequency response.
The NANO Load button is compatible with all FUTEK signal conditioners and amplifiers.