For individuals who have lost part or all of a limb, rehabilitation is always a difficult process. For those who have undergone trans-tibial amputation, their prosthesis needs to replace the function of the biological limb below the knee. FUTEK worked with Humotech in selecting a sensor for a robotic prosthetic foot that can mimic different devices to help find the one that optimizes an individual’s gait. By mounting our LCM200 Miniature Threaded In-Line Load Cell as a gait analysis sensor in-line with a servo-driven cable system, Humotech was able to create a closed-loop system that enables patient's to test-drive products for a better fit and speedier rehabilitation.
How it Works
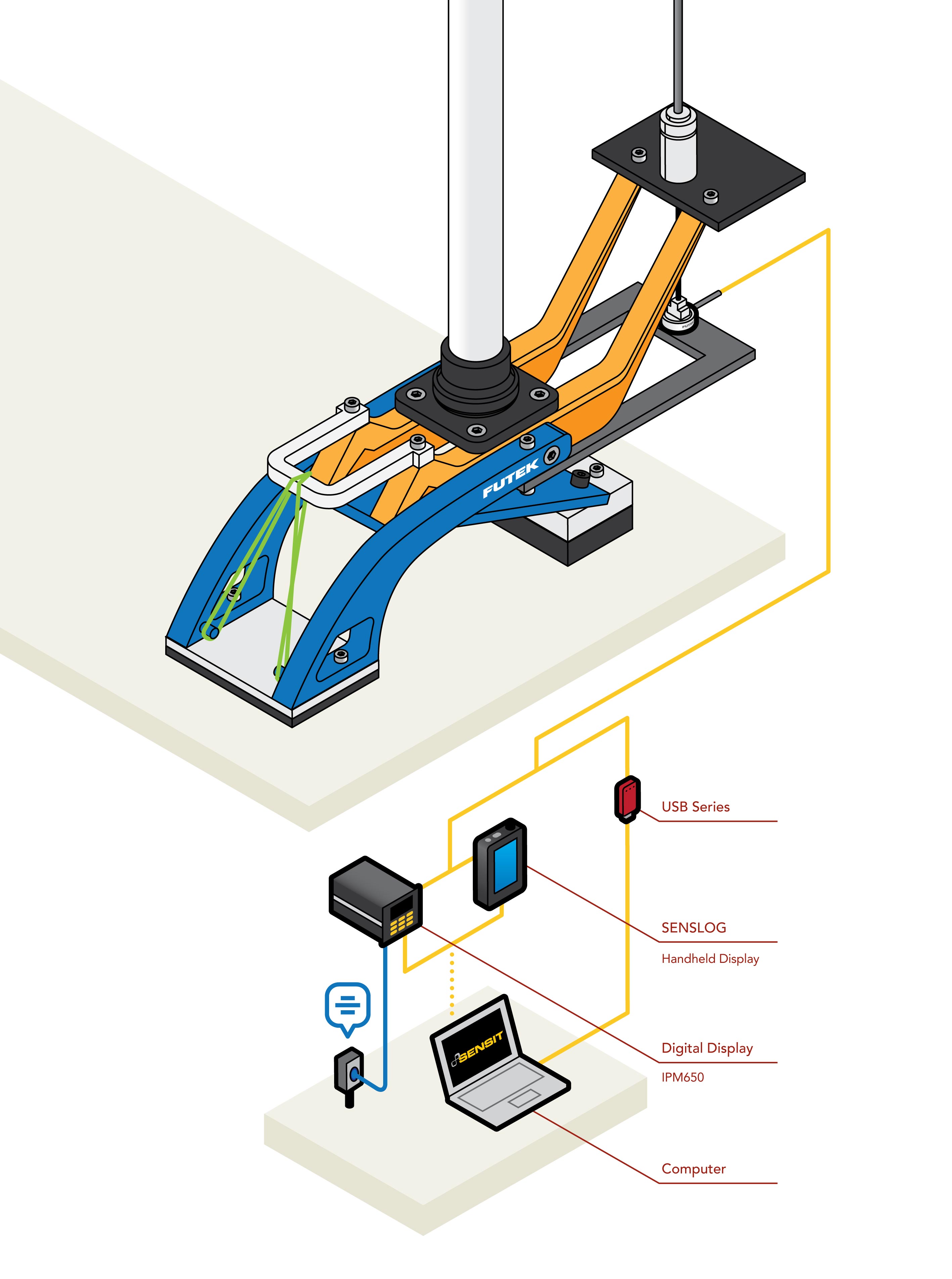
The opposite end of the LCM200 is mounted into the heel of the prosthesis.
As the individual walks, the cable pulls on the heel of the prosthesis mimicking the torque generated in walking by an Achilles Tendon.
The force used to actuate the heel is measured by the LCM200 and displayed with the IPM650 Panel Mount Display, SENSLOG Handheld Display, or on a PC using the USB225 High Resolution Output Module and our SENSIT™ software.
The instruments are then connected to a PC over USB 2.0 which drives the servo motor, closing the control loop, and allowing the system to actively adapt to an individual’s gait.
With the IDA100, amplifier output can be simultaneously monitored and adjusted on a Windows PC with our SENSIT™ software while providing high speed, amplified, analog output for PLCs and Motion Controllers.
One end of the LCM200 is attached to the control wire attached to the servo driven cable actuator, functioning as a gait analysis sensor.
Products in Use
FUTEK's LCM200 Miniature Threaded In-Line Load Cell paired with Instrumentation (SensLog Handheld Display, IPM650, USB Series, IDA100)





Contact Us
Please Contact Us with questions.
For individuals who have lost part or all of a limb, rehabilitation is always a difficult process. For those who have undergone trans-tibial amputation, their prosthesis needs to replace the function of the biological limb below the knee. FUTEK worked with Humotech in selecting a sensor for a robotic prosthetic foot that can mimic different devices to help find the one that optimizes an individual’s gait. By mounting our LCM200 Miniature Threaded In-Line Load Cell as a gait analysis sensor in-line with a servo-driven cable system, Humotech was able to create a closed-loop system that enables patient's to test-drive products for a better fit and speedier rehabilitation.