What is a Stepper motor and how to measure its torque?
What is a Stepper Motor?
A stepper motor, also known as a step motor, distinguishes itself by rotating in fixed angular steps rather than continuously. This brushless, synchronous DC motor converts digital pulses into precise mechanical shaft rotations. Serving as a digital input-output device, it excels in applications where control signals are digital pulses. One pulse increments the motor by a precise angle, and as pulse frequency rises, step movements transition into continuous rotation. Stepper motors offer precision starting and stopping, utilizing coils in phases for controlled, fractional rotations referred to as 'steps.'
The stepper motor is commonly used where precise positioning is a requirement, such as hard disk drives, robotics, antennas, telescopes, 3D printing equipment, Medical Devices, robotics and CNC machines.
How to Measure Torque on a Stepper Motor?
A relatively simple method to estimate stepper motor torque is to measure its electrical power input, the voltage and the current in the power line driving the stepper motor drive. For most motors, torque is directly proportional to the current and can be derived from it by knowing shaft speed and motor efficiency. This is considered an indirect measurement of torque since it is not the true mechanical torque but instead a relation from electrical power quantities to a theoretical and estimated torque value.
However, for a precise and accurate shaft output torque measurement, a reaction torque sensor used as a stepper motor torque sensor is the recommended method.
Automated systems in a variety of different industries rely on stepper motors to monitor linear and rotational motion. Frictional loss and motor speed change necessitate the inclusion of a closed loop control system, which can be accomplished with reaction torque sensor mounted with the assembly.
Stepper Motor Torque Ripple Measurement
Torque ripple refers to fluctuations in torque output during a motor's operation, often resulting from the stepping sequence. Mathematically, torque ripple is defined as the difference between the maximum and minimum torque produced over one mechanical revolution of the motor, divided by the average torque produced over one revolution, expressed as a percentage.
Reaction torque sensors used on stepper motor torque test applications enable measurement of both cogging torque and torque ripple, aiding engineers to identify, quantity and minimize these fluctuations for smoother motor performance.
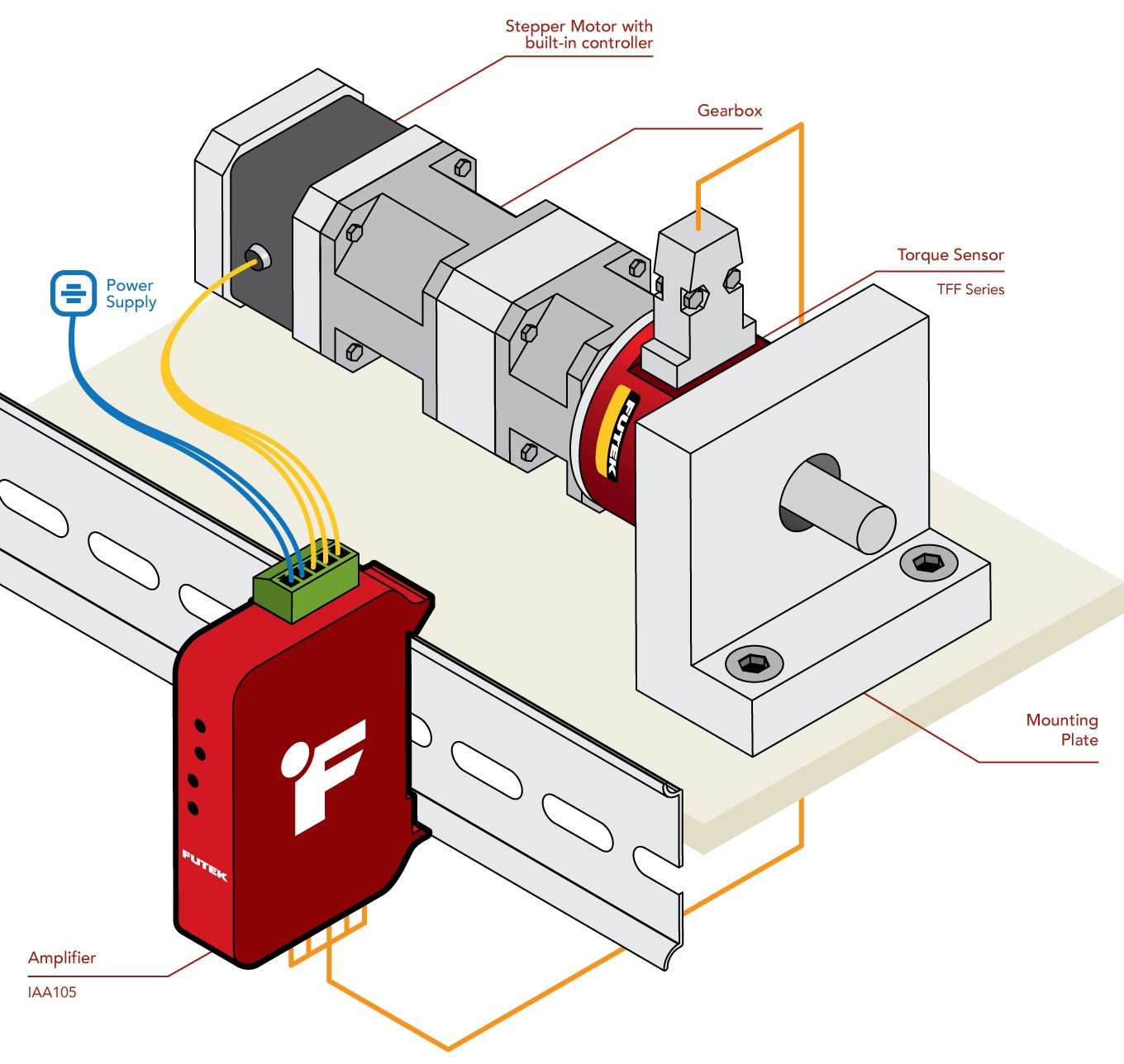
How it Works
FUTEK's TFF500 Reaction Torque Sensor is mounted between a CGI Prime 017PLX Planetary Angle Gearhead and the gearhead’s mounting location.
As the stepper motor runs, the torque produced and transmitted through the NEMA 17 gearhead is measured by the TFF500 (stepper motor torque feedback).
The IAA signal conditioner amplifies the TFF500 signal for input into a PLC for closed loop control system for torque control.
Tmotor = Torque applied by the motor + gearbox;
Treaction = Reaction torque measured by the FUTEK Reaction Torque Sensors that keeps the motor stator/body from spinning ;
Treaction = -Tmotor.


Contact Us
Please Contact Us with questions.
What is a Stepper motor and how to measure its torque?
What is a Stepper Motor?
A stepper motor, also known as a step motor, distinguishes itself by rotating in fixed angular steps rather than continuously. This brushless, synchronous DC motor converts digital pulses into precise mechanical shaft rotations. Serving as a digital input-output device, it excels in applications where control signals are digital pulses. One pulse increments the motor by a precise angle, and as pulse frequency rises, step movements transition into continuous rotation. Stepper motors offer precision starting and stopping, utilizing coils in phases for controlled, fractional rotations referred to as 'steps.'
The stepper motor is commonly used where precise positioning is a requirement, such as hard disk drives, robotics, antennas, telescopes, 3D printing equipment, Medical Devices, robotics and CNC machines.
How to Measure Torque on a Stepper Motor?
A relatively simple method to estimate stepper motor torque is to measure its electrical power input, the voltage and the current in the power line driving the stepper motor drive. For most motors, torque is directly proportional to the current and can be derived from it by knowing shaft speed and motor efficiency. This is considered an indirect measurement of torque since it is not the true mechanical torque but instead a relation from electrical power quantities to a theoretical and estimated torque value.
However, for a precise and accurate shaft output torque measurement, a reaction torque sensor used as a stepper motor torque sensor is the recommended method.
Automated systems in a variety of different industries rely on stepper motors to monitor linear and rotational motion. Frictional loss and motor speed change necessitate the inclusion of a closed loop control system, which can be accomplished with reaction torque sensor mounted with the assembly.
Stepper Motor Torque Ripple Measurement
Torque ripple refers to fluctuations in torque output during a motor's operation, often resulting from the stepping sequence. Mathematically, torque ripple is defined as the difference between the maximum and minimum torque produced over one mechanical revolution of the motor, divided by the average torque produced over one revolution, expressed as a percentage.
Reaction torque sensors used on stepper motor torque test applications enable measurement of both cogging torque and torque ripple, aiding engineers to identify, quantity and minimize these fluctuations for smoother motor performance.