In robotic arm applications that require high precision and control, i.e. surgical robotics, engineers can utilize strain wave gearing (aka a harmonic strain wave drive) to improve the robot’s performance.
Strain wave gearing benefits in robotic arm applications:
- Reduces the inertia of the robot arm and improves dynamic performance through faster acceleration and faster settling time.
- Offers high reduction ratios in a single stage and very low backlash,
- Increases payload capacity and reduce power requirements
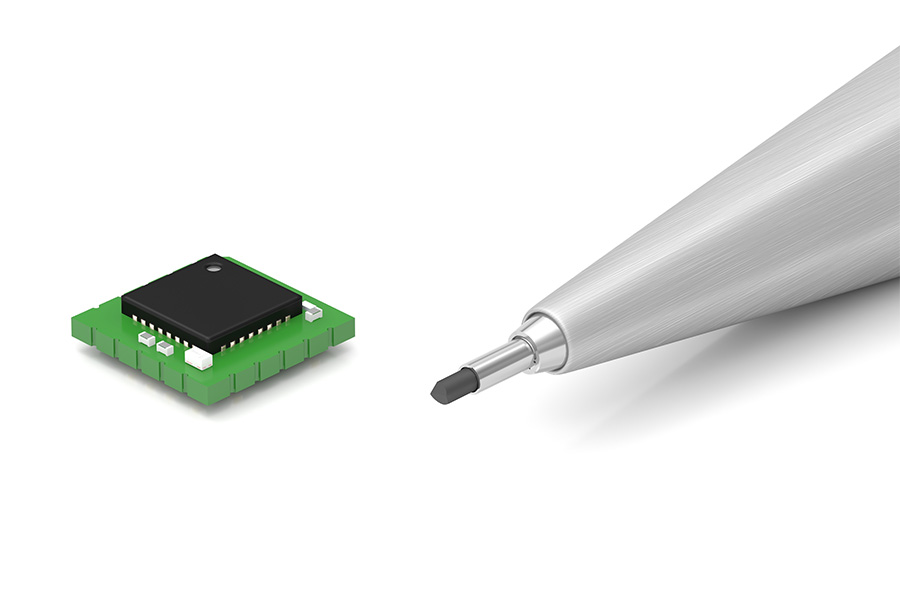
FUTEK’s torque engineering team has deep expertise in customizing low-profile, high-precision strain wave harmonic gearing torque sensors for any robotic application that uses strain wave gear technology. Not only is the geometry of the sensor customizable, giving mechanical integration flexibility, but our team is also highly adaptable in working with customers on connectivity (connector/cable) and the electrical interface to provide a solution that meets noise, performance, power consumption, fault detection, and other specific requirements.
Strain wave harmonic gearing torque sensors benefits in robotic arm applications:
- Supports motion control with low power consumption
- Light-weight, low-profile, and high-precision capabilities for closed-loop feedback
- High flexibility in geometry and design
- Can be distributed over the robotic arm joints, which reduces the overall moment of inertia, as well as reducing the overall robot arm power consumption
An alternative to six-degrees-of-freedom sensors
Strain wave harmonic gearing sensors also have unique capabilities that make them an alternative solution to six-degrees-of-freedom( 6 DOF) sensors for certain types of high-precision robotic arm applications, such as minimally invasive robotic surgery.
For example, during some laparoscopic surgery procedures, surgeons must hold the position of the end effector (the instrument inside the abdominal cavity) while the robot arm is moving. This maneuver is difficult to perform with 6 DOF sensors only, as requires torque measurement on each joint in order to properly calculate the direction and magnitude of the equivalent force based on the output of each joint torque.
Other benefits of using strain wave harmonic gearing sensor as an alternative to 6 DOF sensors:
- Less expensive to implement as torque measurement can be implemented for selected joints only
- Single-channel per joint substantially reduces the learning curve and hidden implementation costs
- Less expensive to maintain and easier to service, as one sensor can be serviced or replaced without taking down other sensors
- Traditional cross-talk inherited by 6 DOF solution is almost eliminated
- Flexibility on custom geometry for embedded electronics (analog, SPI, etc.)
- Flexibility on electronics to embed fault detection and add redundancy
- Lightweight - Each joint torque sensor weighs approximately 30 grams (including cables), compared to ~400 grams of traditional 6 DoF F/T Sensors.
- High-temperature stability
- Great linearity and repeatability specifications
- More data available, better resolution from separate sensors at each joint
- Large aperture/hole/ID – easier to pass wiring and tools through
FUTEK's harmonic gearing torque sensors can be customized to comply with the functional safety requirements of ISO13849 standards.
How it Works
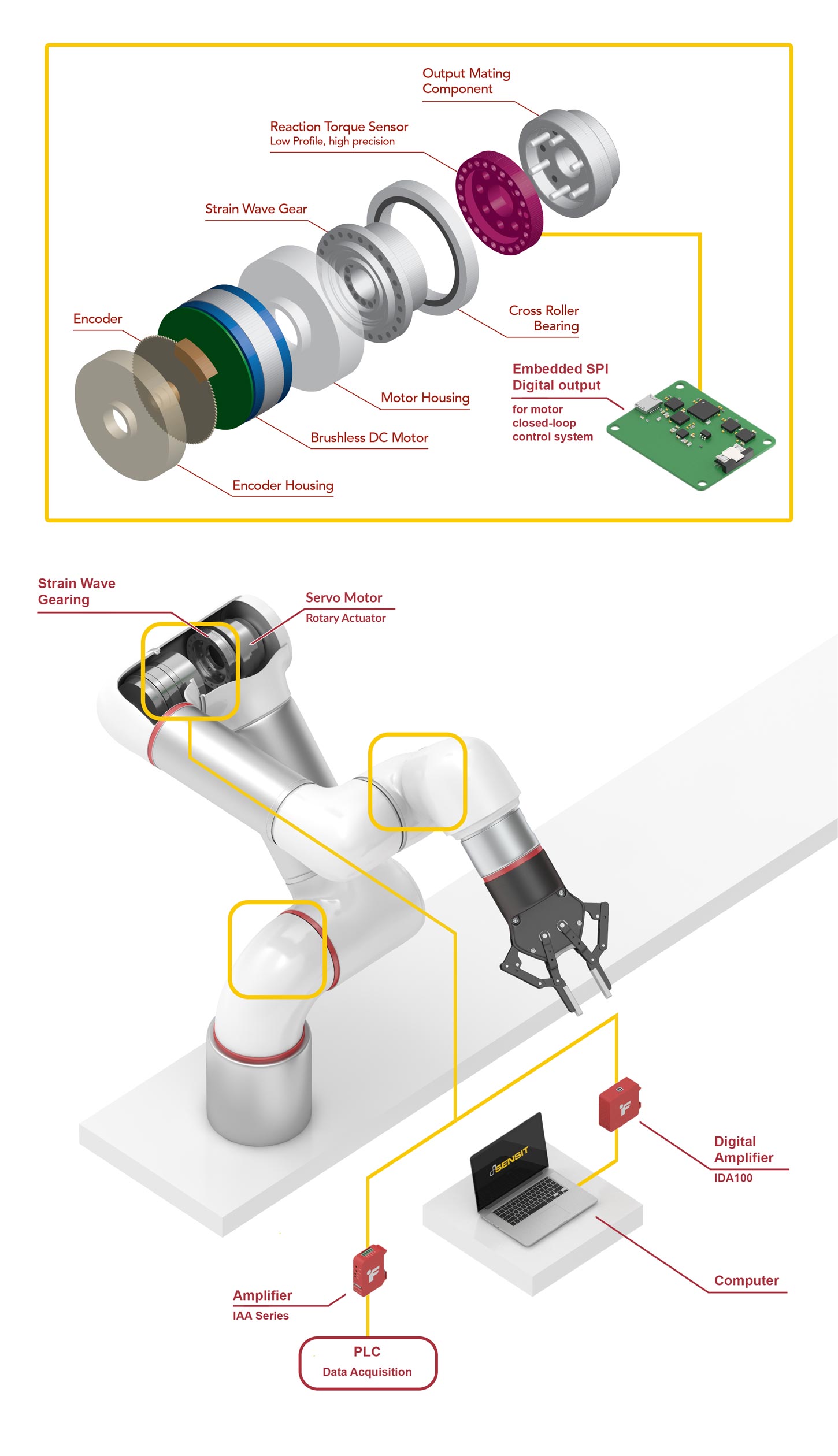
The strain wave gearing torque sensor is mounted between the robot arm strain wave gearbox and its mounting points.
The torque sensor measures the torque outputted during arm movement which is then amplified by the IAA Series , IDA100 amplifier or QIA Multi-Channel SPI Digital Output.
The amplified signal is then sent to the PLC or robotic arm controller, providing high precision torque feedback and allowing closed control loop system.
Additionally, with the IDA100, amplified output from the sensor can be monitored and analog amplifier settings can be adjusted digitally with FUTEK's SENSIT™ Software.
Products in Use
Light-weight, low-profile, and high-precision Strain wave gearing torque sensors, paired with IAA Series Analog amplifiers, IDA100 Signal Conditioner or QIA Multi-Channel SPI Digital Output.


Contact Us
Please Contact Us with questions.
In robotic arm applications that require high precision and control, i.e. surgical robotics, engineers can utilize strain wave gearing (aka a harmonic strain wave drive) to improve the robot’s performance.
Strain wave gearing benefits in robotic arm applications:
- Reduces the inertia of the robot arm and improves dynamic performance through faster acceleration and faster settling time.
- Offers high reduction ratios in a single stage and very low backlash,
- Increases payload capacity and reduce power requirements
FUTEK’s torque engineering team has deep expertise in customizing low-profile, high-precision strain wave harmonic gearing torque sensors for any robotic application that uses strain wave gear technology. Not only is the geometry of the sensor customizable, giving mechanical integration flexibility, but our team is also highly adaptable in working with customers on connectivity (connector/cable) and the electrical interface to provide a solution that meets noise, performance, power consumption, fault detection, and other specific requirements.
Strain wave harmonic gearing torque sensors benefits in robotic arm applications:
- Supports motion control with low power consumption
- Light-weight, low-profile, and high-precision capabilities for closed-loop feedback
- High flexibility in geometry and design
- Can be distributed over the robotic arm joints, which reduces the overall moment of inertia, as well as reducing the overall robot arm power consumption
An alternative to six-degrees-of-freedom sensors
Strain wave harmonic gearing sensors also have unique capabilities that make them an alternative solution to six-degrees-of-freedom( 6 DOF) sensors for certain types of high-precision robotic arm applications, such as minimally invasive robotic surgery.
For example, during some laparoscopic surgery procedures, surgeons must hold the position of the end effector (the instrument inside the abdominal cavity) while the robot arm is moving. This maneuver is difficult to perform with 6 DOF sensors only, as requires torque measurement on each joint in order to properly calculate the direction and magnitude of the equivalent force based on the output of each joint torque.
Other benefits of using strain wave harmonic gearing sensor as an alternative to 6 DOF sensors:
- Less expensive to implement as torque measurement can be implemented for selected joints only
- Single-channel per joint substantially reduces the learning curve and hidden implementation costs
- Less expensive to maintain and easier to service, as one sensor can be serviced or replaced without taking down other sensors
- Traditional cross-talk inherited by 6 DOF solution is almost eliminated
- Flexibility on custom geometry for embedded electronics (analog, SPI, etc.)
- Flexibility on electronics to embed fault detection and add redundancy
- Lightweight - Each joint torque sensor weighs approximately 30 grams (including cables), compared to ~400 grams of traditional 6 DoF F/T Sensors.
- High-temperature stability
- Great linearity and repeatability specifications
- More data available, better resolution from separate sensors at each joint
- Large aperture/hole/ID – easier to pass wiring and tools through
FUTEK's harmonic gearing torque sensors can be customized to comply with the functional safety requirements of ISO13849 standards.