Measuring torque generated by motors or brakes can be accomplished via directly coupling a rotary torque sensor inline with the motor shaft or mounting the motor directly to a reaction torque sensor. However, sometimes neither of these solutions work, such as with a torque dynamometer. In this case, a load cell is used and the equation Torque = Force x Distance is used to convert the measured force to torque (torque load cell).
How it Works
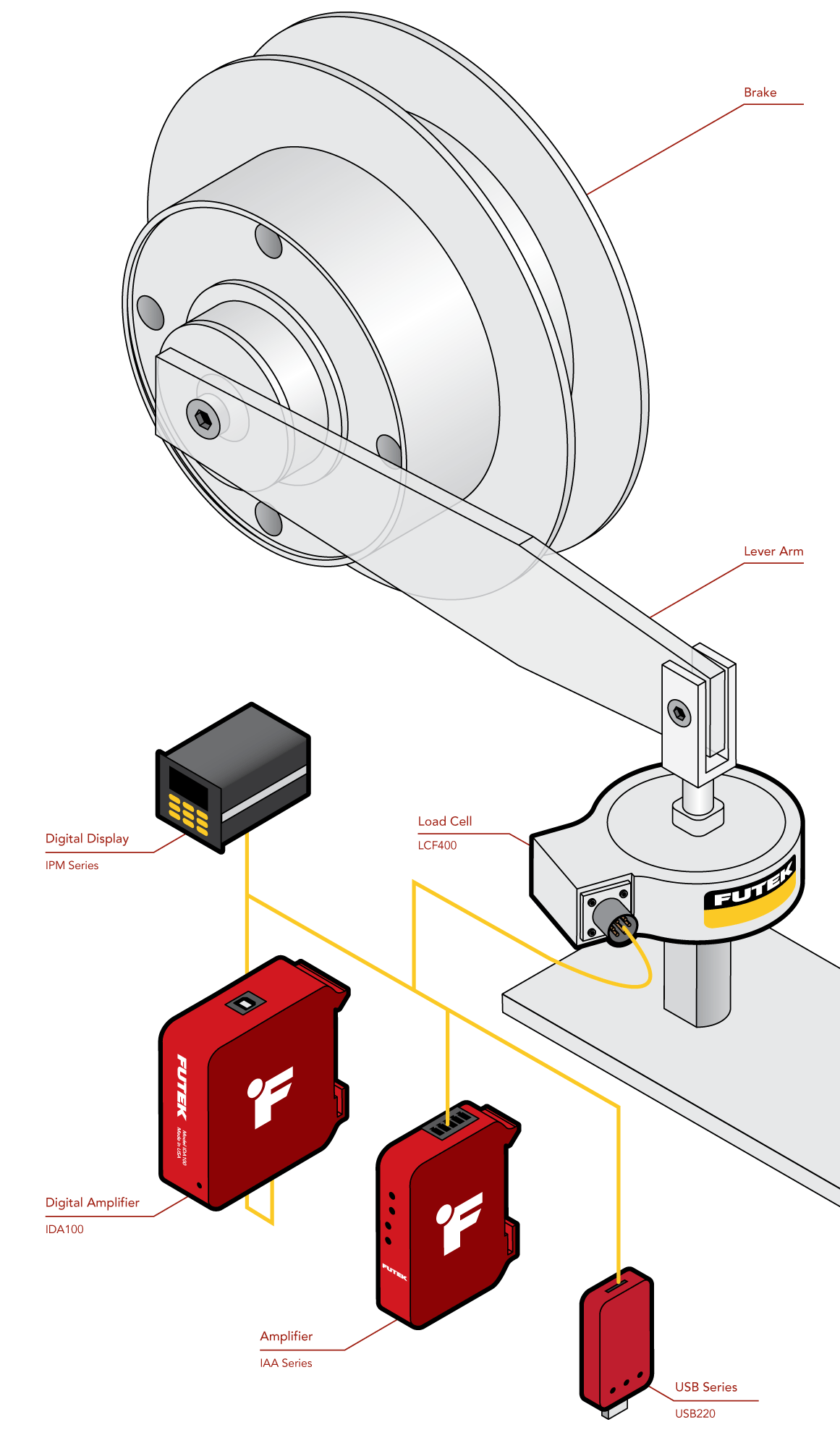
A brake has a moment arm attached with a fixed distance to the center of the axis of rotation.
At the end of the moment arm, an LCF400 load cell is attached to measure the force generated through the arm as the brake generates torque as it resists motion, acting as a torque load cell transducer.
In this scenario, the LCF400 is ideal, since it is highly resistant to extraneous loads and can resistant sudden changes in motor output.
The signal generated by the LCF400 is then amplified via an IAA series Analog Amplifier to be sent to a DAQ, displayed by an IPM650 Panel Mount Display, or logged using the USB225 USB Output Module on a PC running SENSIT.
Any force measured by the LCF400 can simply be multiplied by the distance to the center of the motor to derive the torque via the equation: Torque = Force x Distance.
Force to Torque Conversion can be performed automatically, in real time, using the math function on the included in SENSIT.
Additionally, the IDA100 Digitally Configurable Amplifier can be used to monitor the torque via the SENSIT software while generating an analog output for closing the loop with a motor controller.
Products in Use
LCF400 Universal Pancake Load Cell paired with Instrumentation (USB225 High Resolution USB Solution, IPM650 Intelligent Panel Mount Display, IDA100 Digitally Configurable Amplifier, or IAA Series Analog Amplifier)




Contact Us
Please Contact Us with questions.
Measuring torque generated by motors or brakes can be accomplished via directly coupling a rotary torque sensor inline with the motor shaft or mounting the motor directly to a reaction torque sensor. However, sometimes neither of these solutions work, such as with a torque dynamometer. In this case, a load cell is used and the equation Torque = Force x Distance is used to convert the measured force to torque (torque load cell).