Strain Wave Gearing Torque Sensors for Cobot Joint Control and Functional Safety
In collaborative robot (cobot) applications that demand high precision, safety, and human-robot interaction, engineers are increasingly turning to strain wave gearing (also known as strain wave gearing drive systems) to optimize joint-level performance and improve overall motion control.
Why strain wave gearing is ideal for collaborative robot arms:
- Reduces joint inertia and improves dynamic responsiveness through faster acceleration and shorter settling times
- Enables high reduction ratios in a single stage while maintaining ultra-low backlash
- Increases payload capabilities while reducing motor power consumption—key for battery-powered cobots or mobile platforms
FUTEK’s Engineering for Cobot Torque Sensing
FUTEK’s torque engineering team specializes in custom low-profile, high-accuracy torque sensors designed specifically for strain wave gearing in cobot joints. These sensors deliver real-time feedback for closed-loop force/torque control, enabling smooth, precise, and safe collaborative motion.
We offer:
- Complete mechanical customization to integrate directly with the strain wave gear drive geometry
- Flexible connectivity (cables, connectors, embedded PCBs) tailored to each cobot platform
- Customizable electrical interface for SPI, UART, analog output, or fault detection circuitry
- Compliance support for ISO 13849 and functional safety protocols critical to collaborative systems
Benefits of FUTEK’s Harmonic Gearing Torque Sensors for Cobot Joints:
- Ultra lightweight and compact (<30g including cables), ideal for multi-axis cobot arms
- Low power consumption for efficient battery or mobile-powered systems
- High linearity and repeatability for precise joint-level control
- Modular integration across multiple joints to reduce overall moment of inertia and improve safety response times
- Custom form factors with large internal diameters for cable and utility pass-throughs
- Supports redundancy and health monitoring to meet safety-critical design requirements
A Smart Alternative to 6-DOF Force/Torque Sensors in Cobots
For many precision cobot applications, FUTEK’s joint-level harmonic gearing torque sensors offer a cost-effective and safer alternative to traditional 6-DOF F/T sensors.
For example, during tasks requiring tool position holding—such as in minimally invasive surgery or delicate assembly—precise torque measurement at each joint allows for accurate reconstruction of applied forces, something difficult to achieve with only end-effector-based 6-DOF sensors.
Advantages over 6-DOF Sensors in Collaborative Robotics:
- Lower implementation cost by deploying torque sensing only at selected joints
- Less expensive to maintain and easier to service, as one sensor can be serviced or replaced without taking down other sensors
- Eliminates traditional cross-talk issues associated with 6-DOF sensors
- Greatly reduces system weight (~30g per joint sensor vs. ~400g 6-DOF F/T sensors)
- Simplified integration with embedded safety features, analog or digital outputs (SPI, UART)
- Higher resolution and localized joint data for advanced control algorithms
- Improved thermal stability, linearity, and redundancy in safety-critical designs
Designed for the Future of Safe Human-Robot Collaboration
FUTEK’s Harmonic Gearing Torque Sensors are purpose-built to meet the performance and safety requirements of collaborative robots, supporting a new generation of smart, responsive, and safe automation platforms. All custom solutions can be tailored to meet ISO 13849 safety compliance, enabling advanced functional safety and peace of mind for cobot manufacturers, integrators, and end users.
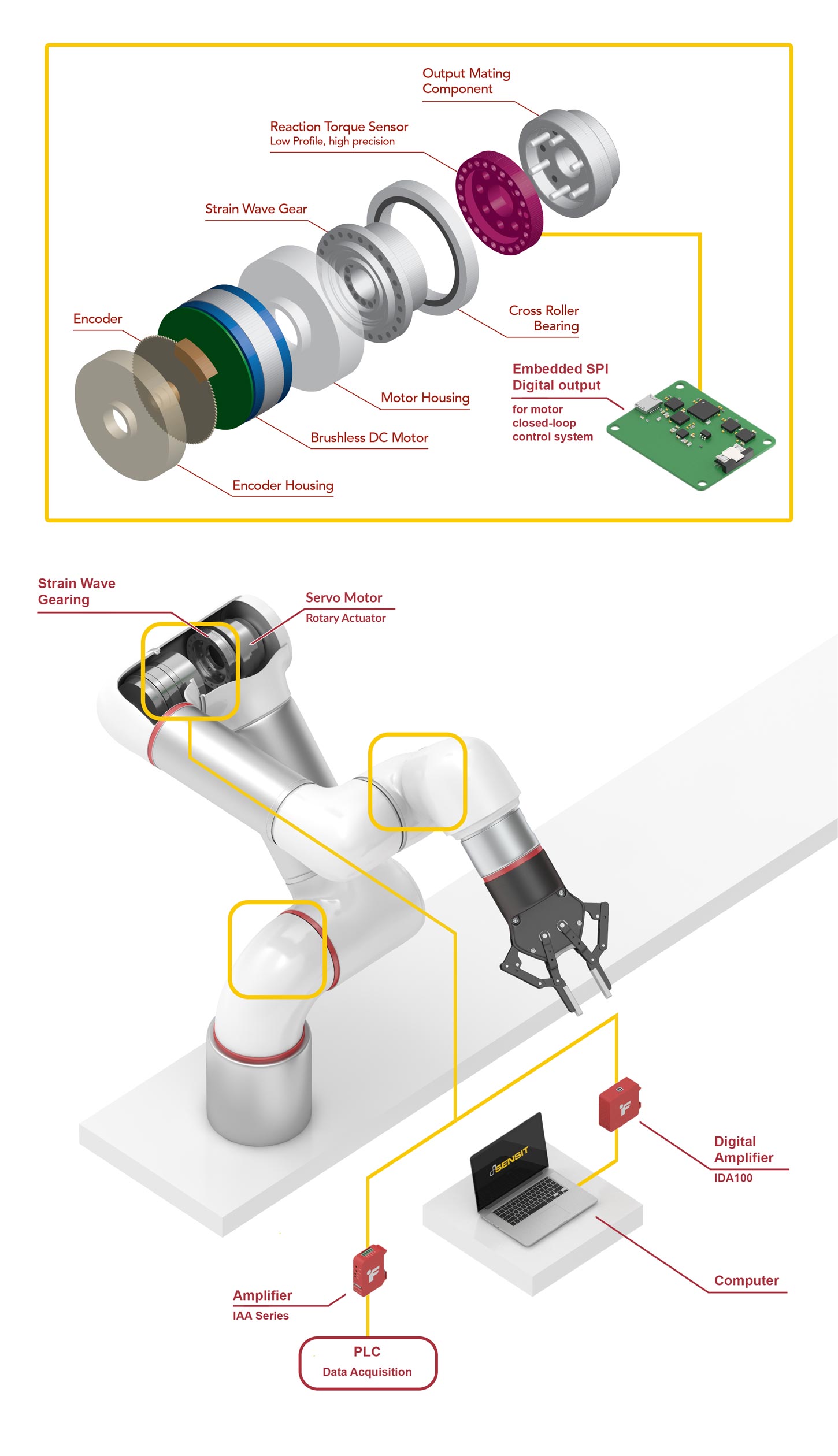
How it Works
A TFF Series Reaction Torque Sensor is mounted between the robot arm servo motor and it's mounting points.
The torque sensor measures the torque outputted during arm movement which is then amplified by the IAA Series or IDA100 amplifier.
The amplified signal is then sent to the PLC or robotic arm controller, providing precision feedback and closing the control loop.
Additionally, with the IDA100, amplified output from the sensor can be monitored and analog amplifier settings can be adjusted digitally with FUTEK's SENSIT™ Software.
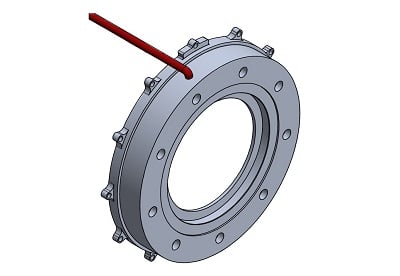
Products in Use
TFF Series Reaction Torque Sensor with Thru Hole Center paired with FUTEK Amplifiers (IAA Series or IDA100)

Contact Us
Please Contact Us with questions.
Strain Wave Gearing Torque Sensors for Cobot Joint Control and Functional Safety
In collaborative robot (cobot) applications that demand high precision, safety, and human-robot interaction, engineers are increasingly turning to strain wave gearing (also known as strain wave gearing drive systems) to optimize joint-level performance and improve overall motion control.
Why strain wave gearing is ideal for collaborative robot arms:
- Reduces joint inertia and improves dynamic responsiveness through faster acceleration and shorter settling times
- Enables high reduction ratios in a single stage while maintaining ultra-low backlash
- Increases payload capabilities while reducing motor power consumption—key for battery-powered cobots or mobile platforms
FUTEK’s Engineering for Cobot Torque Sensing
FUTEK’s torque engineering team specializes in custom low-profile, high-accuracy torque sensors designed specifically for strain wave gearing in cobot joints. These sensors deliver real-time feedback for closed-loop force/torque control, enabling smooth, precise, and safe collaborative motion.
We offer:
- Complete mechanical customization to integrate directly with the strain wave gear drive geometry
- Flexible connectivity (cables, connectors, embedded PCBs) tailored to each cobot platform
- Customizable electrical interface for SPI, UART, analog output, or fault detection circuitry
- Compliance support for ISO 13849 and functional safety protocols critical to collaborative systems
Benefits of FUTEK’s Harmonic Gearing Torque Sensors for Cobot Joints:
- Ultra lightweight and compact (<30g including cables), ideal for multi-axis cobot arms
- Low power consumption for efficient battery or mobile-powered systems
- High linearity and repeatability for precise joint-level control
- Modular integration across multiple joints to reduce overall moment of inertia and improve safety response times
- Custom form factors with large internal diameters for cable and utility pass-throughs
- Supports redundancy and health monitoring to meet safety-critical design requirements
A Smart Alternative to 6-DOF Force/Torque Sensors in Cobots
For many precision cobot applications, FUTEK’s joint-level harmonic gearing torque sensors offer a cost-effective and safer alternative to traditional 6-DOF F/T sensors.
For example, during tasks requiring tool position holding—such as in minimally invasive surgery or delicate assembly—precise torque measurement at each joint allows for accurate reconstruction of applied forces, something difficult to achieve with only end-effector-based 6-DOF sensors.
Advantages over 6-DOF Sensors in Collaborative Robotics:
- Lower implementation cost by deploying torque sensing only at selected joints
- Less expensive to maintain and easier to service, as one sensor can be serviced or replaced without taking down other sensors
- Eliminates traditional cross-talk issues associated with 6-DOF sensors
- Greatly reduces system weight (~30g per joint sensor vs. ~400g 6-DOF F/T sensors)
- Simplified integration with embedded safety features, analog or digital outputs (SPI, UART)
- Higher resolution and localized joint data for advanced control algorithms
- Improved thermal stability, linearity, and redundancy in safety-critical designs
Designed for the Future of Safe Human-Robot Collaboration
FUTEK’s Harmonic Gearing Torque Sensors are purpose-built to meet the performance and safety requirements of collaborative robots, supporting a new generation of smart, responsive, and safe automation platforms. All custom solutions can be tailored to meet ISO 13849 safety compliance, enabling advanced functional safety and peace of mind for cobot manufacturers, integrators, and end users.