


 Store
Store Service
Service Applications
Applications Support
Support Contact
Contact






One of the more efficient means of satellite attitude control is using reaction wheels. Reaction wheels scale easily making them excellent candidates for attitude control systems in a CubeSat. They create small torque changes necessary to keep a communication antenna pointing at earth or a telescope pointing at a star. By utilizing a micro torque sensor, the response time and torque output of the motor/flywheel can be measured, allowing for precision control loop gains to be established for the PID balancing functions used to stabilize the spacecraft.
How it Works
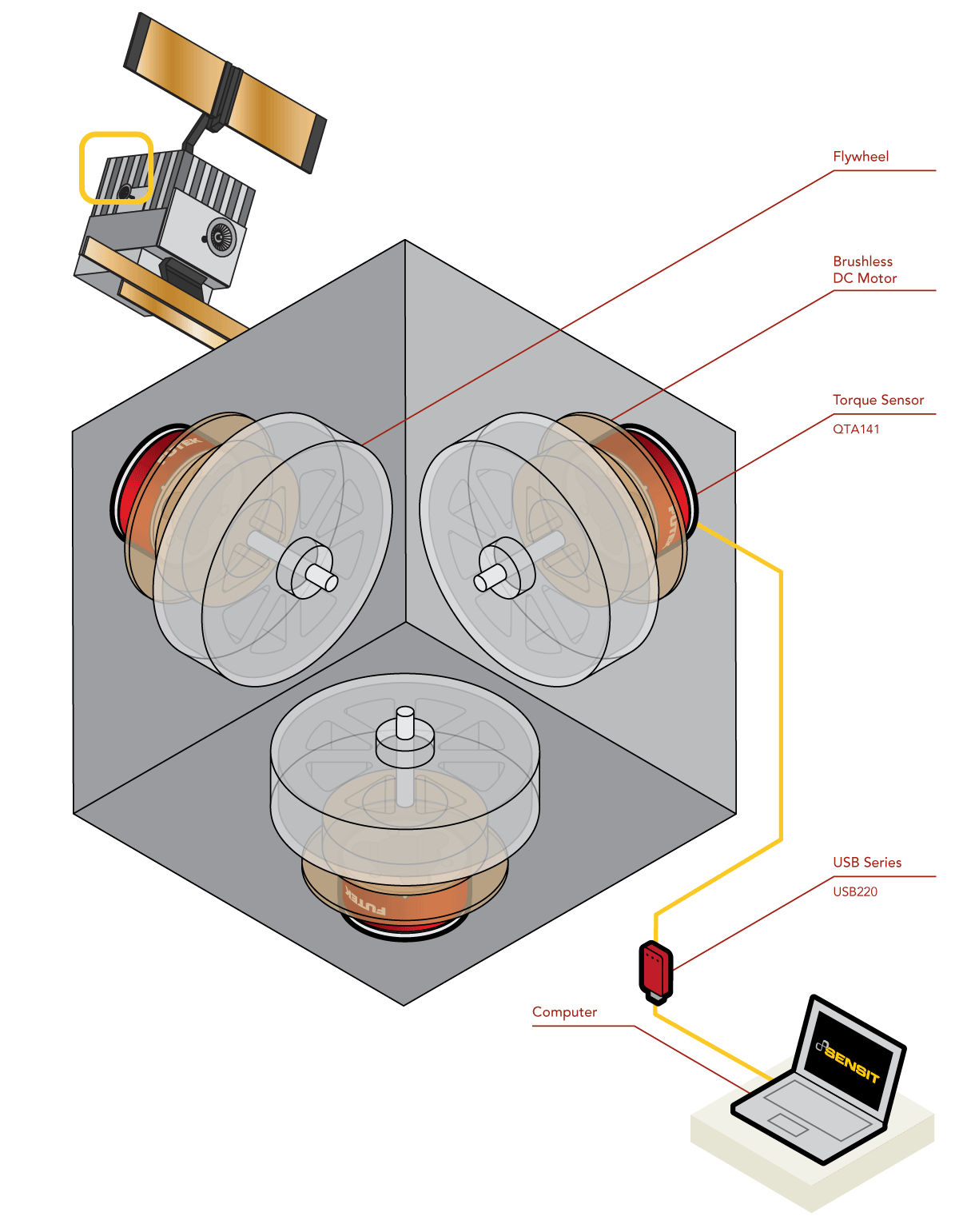
As an electric motor spins a flywheel, the torque generated is used to provide attitude stabilization about the axis the motor is mounted on.
The QTA141 Micro Reaction Torque Sensor is mounted between a brushless DC motor and the wall of the satellite.
As the electric motor spins the flywheel up to the commanded rotational velocity, the resulting torque is reported by the QTA141 Torque Sensor.
The torque generated is used to provide attitude stabilization about the axis the motor is mounted on.
The measured torque is then displayed and recorded with the USB220 via FUTEK’s SENSIT™ software.
Products in Use
FUTEK’s QTA141 Micro Reaction Torque Sensor paired with the USB220 High Resolution USB Solution.


Contact Us
All FUTEK application illustrations are strictly conceptual.
Please Contact Us with questions.
Please Contact Us with questions.
One of the more efficient means of satellite attitude control is using reaction wheels. Reaction wheels scale easily making them excellent candidates for attitude control systems in a CubeSat. They create small torque changes necessary to keep a communication antenna pointing at earth or a telescope pointing at a star. By utilizing a micro torque sensor, the response time and torque output of the motor/flywheel can be measured, allowing for precision control loop gains to be established for the PID balancing functions used to stabilize the spacecraft.
FUTEK Certifications





FUTEK Social Media









All other trademarks, service marks and logos used in this website are the property of their respective owners.
© 1998–2024 FUTEK Advanced Sensor Technology, Inc. All rights reserved.