What is a Six-Axis Force/Torque Sensor?
A six-degree-of-freedom (6-DoF) force/torque sensor is a precision measurement device engineered to detect forces and torques along all three orthogonal axes (X, Y, Z). These sensors are critical in robotic applications, particularly end-of-arm tooling (EOAT), where they are typically mounted at the robot's wrist joint. By providing precise feedback for both translational and rotational forces, the sensor enables advanced motion control such as compliant manipulation and force-guided assembly.
Which applications require six axis force and torque readings?
Multi-axis force/torque sensors are used in product testing, hand-guiding, haptic feedback, laparoscopic instrumentation, robotic assembly, grinding, polishing, and other industrial applications where precise positioning and trajectory control over the EOAT applied force (robot end-effector) is necessary. These sensors are particularly important in complex assembly operations where the robot encounters challenges such as misalignments, tight fits, and force testing. The six-axis load cell allows the controller to recognize forces and moments acting on the robotic tool, improving end-effector dexterity.
Benefits of FUTEK 6 DoF Force/Torque Sensor:
- Lightweight
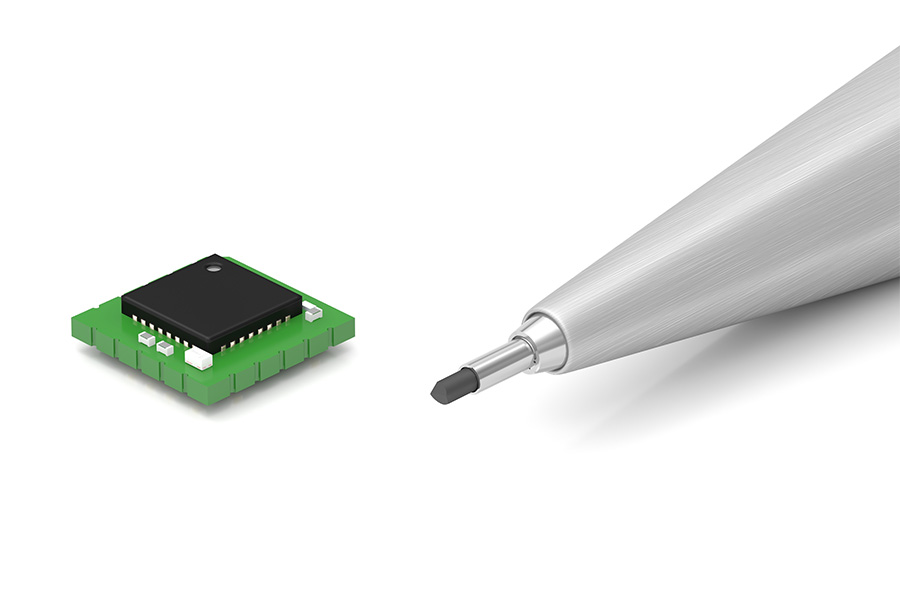
- Low profile
- SPI / USB Digital Output
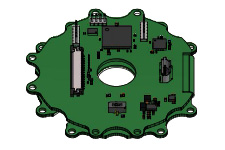
- High resolution embedded electronics with up to 4,800 SPS
- Customizable for specific overload protection range
- Customizable for redundancy and fault detection
- Customizable for low power consumption
- High Zero and temperature stability
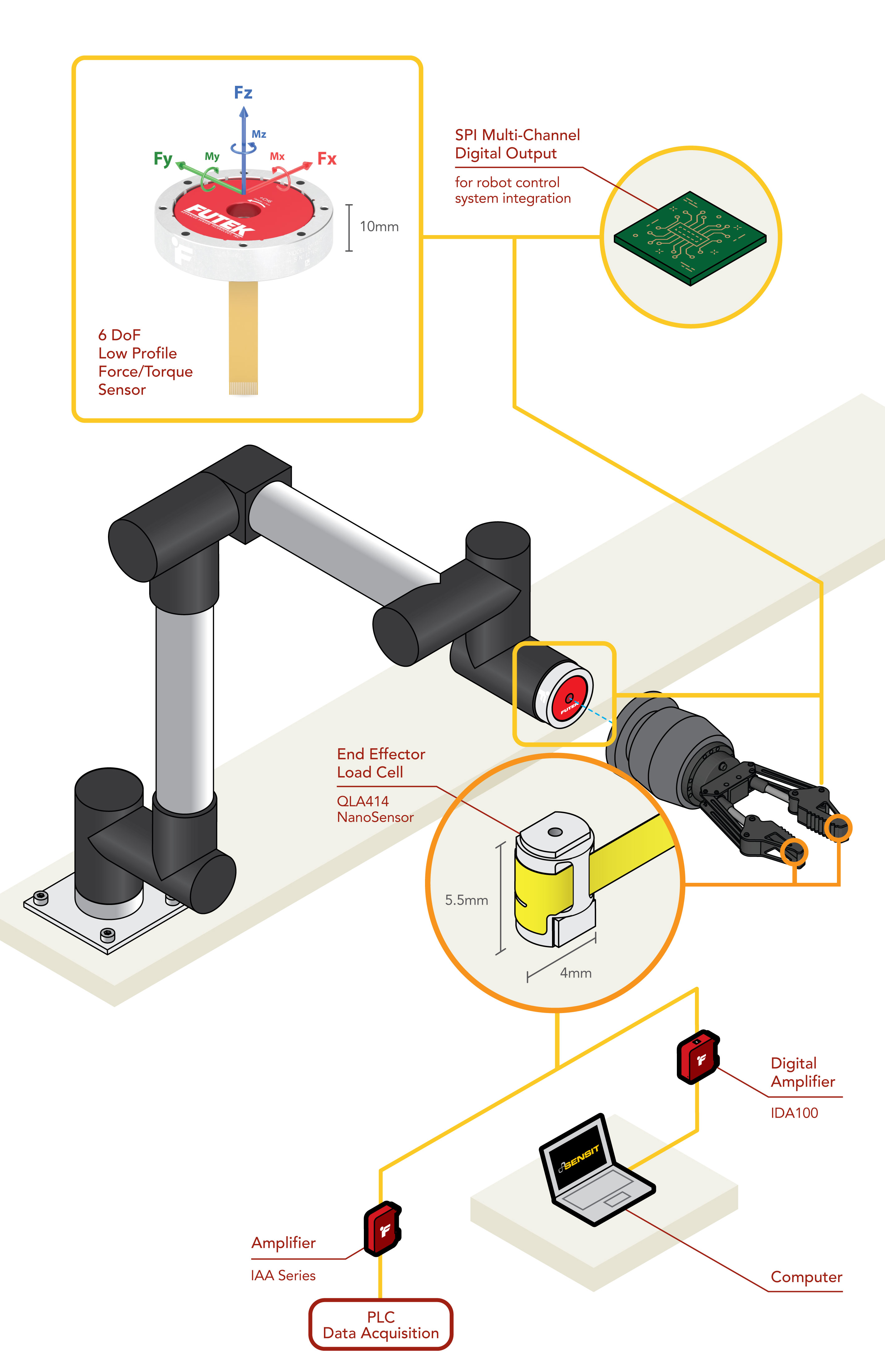
How it Works
The 6 degrees of freedom force sensor is mounted onto the wrist (last joint before the end-effector).
The 6 DoF sensor captures the forces and torques outputted during arm movement. The signal is then conditioned, amplified and digitized by the USB Series or a SPI Digital Output conditioner.
The instrument signal is then sent to the PLC, Desktop PC or robotic arm controller, providing high precision force / torque feedback and allowing closed control loop system.



Contact Us
Please Contact Us with questions.
What is a Six-Axis Force/Torque Sensor?
A six-degree-of-freedom (6-DoF) force/torque sensor is a precision measurement device engineered to detect forces and torques along all three orthogonal axes (X, Y, Z). These sensors are critical in robotic applications, particularly end-of-arm tooling (EOAT), where they are typically mounted at the robot's wrist joint. By providing precise feedback for both translational and rotational forces, the sensor enables advanced motion control such as compliant manipulation and force-guided assembly.
Which applications require six axis force and torque readings?
Multi-axis force/torque sensors are used in product testing, hand-guiding, haptic feedback, laparoscopic instrumentation, robotic assembly, grinding, polishing, and other industrial applications where precise positioning and trajectory control over the EOAT applied force (robot end-effector) is necessary. These sensors are particularly important in complex assembly operations where the robot encounters challenges such as misalignments, tight fits, and force testing. The six-axis load cell allows the controller to recognize forces and moments acting on the robotic tool, improving end-effector dexterity.
Benefits of FUTEK 6 DoF Force/Torque Sensor:
- Lightweight
- Low profile
- SPI / USB Digital Output
- High resolution embedded electronics with up to 4,800 SPS
- Customizable for specific overload protection range
- Customizable for redundancy and fault detection
- Customizable for low power consumption
- High Zero and temperature stability