What is a Six-Axis Force/Torque Sensor?
A six-degree-of-freedom (6-DoF) force/torque sensor is a precision measurement device engineered to detect forces and torques along and around all three orthogonal axes (X, Y, Z). It provides independent outputs for linear forces (±Fx, ±Fy, ±Fz) and rotational moments (±Mx, ±My, ±Mz). These sensors are critical in robotic applications, particularly for end-of-arm tooling, where they are typically mounted on the robot's wrist joint. By enabling precise feedback for both translational and rotational forces, the sensor facilitates advanced motion control, such as compliant manipulation and force-guided assembly. Commonly referred to as multi-axis force/torque sensors, multi-axis load cells, or 6-axis load cells, these transducers are essential for tasks requiring high accuracy and dynamic force interaction measurements.
Which applications require six axis force and torque readings?
Force/Torque sensors are used for product testing, robotic assembly, grinding, polishing, and other industrial applications where holding a steady position and trajectory high-repeatability is necessary. This sensor is particularly important in complex assembly operations where the robot will encounter different problems (misalignments, tight fits, force tests, etc) and precision motion control over the end-of-arm tooling (EOAT) applied force (robot end-effector) is paramount. The six axis load cell allows the controller to recognize forces and moments on the robotic tool and improves end-effector dexterity.
In the medical device industry, six-degrees-of-freedom force/torque sensors are used in haptic feedback for surgical robotic applications, laparoscopic instruments haptics, and many other applications.
Hand-guiding is a specific application where torque readings are necessary. As the operator guides the end-effector (aka end of arm tooling or EOAT) to teach it a specific path, it generates forces and moments in the robot tool which is then read by the six axis force/torque sensor. These multi-axis torques are then read in all the Cartesians' directions and the signal can be sent to the computer for analysis.
Benefits of FUTEK 6 DoF Force/Torque Sensor:
- Light weight
- Low profile
- SPI / USB Digital Output
- High resolution embedded electronics with up to 4,800 SPS
- Customizable for specific overload protection range
- Customizable for redundancy and fault detection
- Customizable for low power consumption
- High Zero and temperature stability
Why is it important to control robot gripping force?
In some applications, it may also be required to accurately measure and control the robot’s grasping force to make sure that fragile objects are not crushed by the gripper (i.e. semiconductor wafer handling ). Although load cells are reliable sensors for force measurement, they have historically been limited by their bulky construction.
To solve this problem, FUTEK has designed and developed a Nanosensor. Its minuscule geometry of 4 mm x 5 mm fits in the majority of the end-effector grip applications without sacrificing the reliability and precision of standard load cells. Due to its lightweight construction, it offers a high natural frequency response, making it suitable for rapid force changes application. FUTEK’s Nanosensors are customized to suit unique OEM solutions. COTS sensors are also available for proof of concept and low-volume R&D applications.
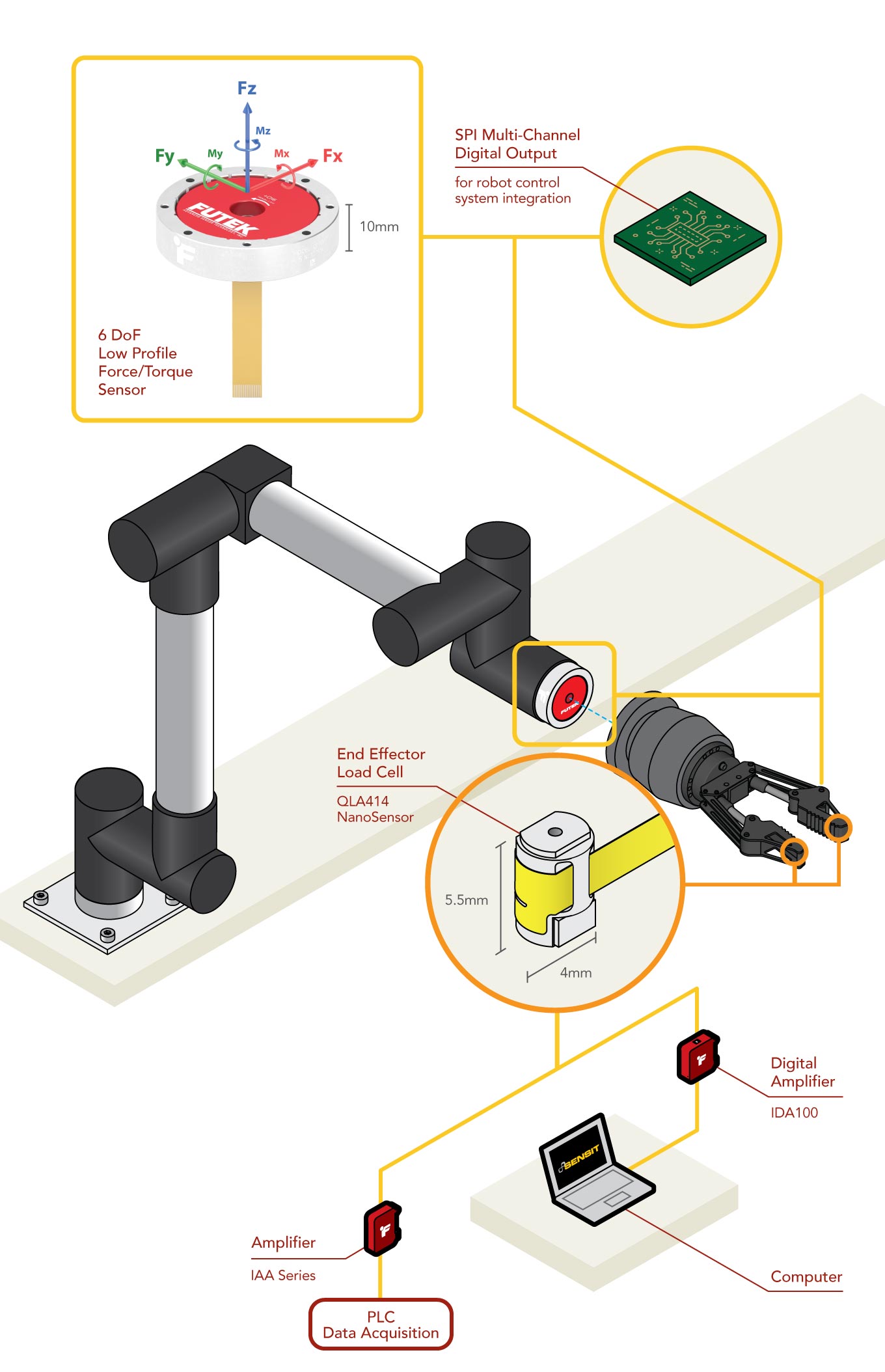
How it Works
The 6 degrees of freedom force sensor is mounted in one of the the robot joints or commonly fitted onto the wrist (last joint before the end-effector).
The 6 DoF sensor captures the forces and torques outputted during arm movement, The sensor signal output signal is then conditioned, amplified and digitized by the USB Series , IDA100 amplifier or QIA Multi-Channel SPI Digital Output.
The instrument signal is then sent to the PLC, Desktop PC or robotic arm controller, providing high precision force / torque feedback and allowing closed control loop system.
Additionally, with the IDA100, amplified output from the sensor can be monitored and analog amplifier settings can be adjusted digitally with FUTEK's SENSIT™ Software.





Contact Us
Please Contact Us with questions.
What is a Six-Axis Force/Torque Sensor?
A six-degree-of-freedom (6-DoF) force/torque sensor is a precision measurement device engineered to detect forces and torques along and around all three orthogonal axes (X, Y, Z). It provides independent outputs for linear forces (±Fx, ±Fy, ±Fz) and rotational moments (±Mx, ±My, ±Mz). These sensors are critical in robotic applications, particularly for end-of-arm tooling, where they are typically mounted on the robot's wrist joint. By enabling precise feedback for both translational and rotational forces, the sensor facilitates advanced motion control, such as compliant manipulation and force-guided assembly. Commonly referred to as multi-axis force/torque sensors, multi-axis load cells, or 6-axis load cells, these transducers are essential for tasks requiring high accuracy and dynamic force interaction measurements.
Which applications require six axis force and torque readings?
Force/Torque sensors are used for product testing, robotic assembly, grinding, polishing, and other industrial applications where holding a steady position and trajectory high-repeatability is necessary. This sensor is particularly important in complex assembly operations where the robot will encounter different problems (misalignments, tight fits, force tests, etc) and precision motion control over the end-of-arm tooling (EOAT) applied force (robot end-effector) is paramount. The six axis load cell allows the controller to recognize forces and moments on the robotic tool and improves end-effector dexterity.
In the medical device industry, six-degrees-of-freedom force/torque sensors are used in haptic feedback for surgical robotic applications, laparoscopic instruments haptics, and many other applications.
Hand-guiding is a specific application where torque readings are necessary. As the operator guides the end-effector (aka end of arm tooling or EOAT) to teach it a specific path, it generates forces and moments in the robot tool which is then read by the six axis force/torque sensor. These multi-axis torques are then read in all the Cartesians' directions and the signal can be sent to the computer for analysis.
Benefits of FUTEK 6 DoF Force/Torque Sensor:
- Light weight
- Low profile
- SPI / USB Digital Output
- High resolution embedded electronics with up to 4,800 SPS
- Customizable for specific overload protection range
- Customizable for redundancy and fault detection
- Customizable for low power consumption
- High Zero and temperature stability
Why is it important to control robot gripping force?
In some applications, it may also be required to accurately measure and control the robot’s grasping force to make sure that fragile objects are not crushed by the gripper (i.e. semiconductor wafer handling ). Although load cells are reliable sensors for force measurement, they have historically been limited by their bulky construction.
To solve this problem, FUTEK has designed and developed a Nanosensor. Its minuscule geometry of 4 mm x 5 mm fits in the majority of the end-effector grip applications without sacrificing the reliability and precision of standard load cells. Due to its lightweight construction, it offers a high natural frequency response, making it suitable for rapid force changes application. FUTEK’s Nanosensors are customized to suit unique OEM solutions. COTS sensors are also available for proof of concept and low-volume R&D applications.