Bei Roboterarm-Anwendungen, die hohe Präzision und Kontrolle erfordern, z. B. in der chirurgischen Robotik, können Ingenieure ein Dehnungswellengetriebe einsetzen (Dehnungswellengetriebe Drehmomentsensor), um die Leistung des Roboters zu verbessern.
Vorteile des Dehnungswellengetriebes bei Roboterarmanwendungen:
- Verringert die Trägheit des Roboterarms und verbessert die dynamische Leistung durch schnellere Beschleunigung und kürzere Einschwingzeit.
- Bietet hohe Untersetzungsverhältnisse in einer einzigen Stufe und ein sehr geringes Umkehrspiel.
- Erhöht die Nutzlastkapazität und reduziert den Energiebedarf.
Das FUTEK-Drehmoment-Engineering-Team verfügt über umfassendes Know-how bei der kundenspezifischen Anpassung von harmonischen Dehnungswellen-Getriebedrehmomentsensoren (Dehnungswellengetriebe Drehmomentsensor) mit niedrigem Profil und hoher Präzision für alle Roboteranwendungen, die Dehnungswellen-Getriebetechnologie verwenden.
Vorteile von Dehnungswellen-Drehmomentsensoren mit harmonischer Verzahnung bei Roboterarm-Anwendungen:
- Unterstützt Bewegungssteuerung mit geringem Stromverbrauch
- Geringes Gewicht, niedriges Profil und hochpräzise Funktionen für Closed-Loop-Feedback
- Hohe Flexibilität in Geometrie und Design
- Kann auf die Gelenke des Roboterarms verteilt werden, was das Gesamtträgheitsmoment und den Stromverbrauch des Roboterarms reduziert
Eine Alternative zu Sechs-Grad-Freiheitsgrad-Sensoren
Harmonische Dehnungswellensensoren haben auch einzigartige Fähigkeiten, die sie zu einer Alternative zu Sensoren mit sechs Freiheitsgraden (6 DOF) für bestimmte Arten von hochpräzisen Roboterarmen machen, z. B. für die minimal-invasive Roboterchirurgie.
Bei einigen laparoskopischen Eingriffen müssen die Chirurgen beispielsweise die Position des Endeffektors (das Instrument in der Bauchhöhle) halten, während sich der Roboterarm bewegt. Dieses Manöver lässt sich nur schwer mit 6 DOF-Sensoren durchführen, da eine Drehmomentmessung an jedem Gelenk erforderlich ist, um die Richtung und die Größe der äquivalenten Kraft auf der Grundlage des Ausgangs jedes Gelenkdrehmoments korrekt zu berechnen.
Weitere Vorteile der Verwendung eines harmonischen Dehnungswellensensors als Alternative zu 6 DOF-Sensoren:
- Weniger kostspielig in der Umsetzung, da die Drehmomentmessung nur für ausgewählte Verbindungen durchgeführt werden kann
- Ein einziger Kanal pro Gelenk reduziert die Lernkurve und versteckte Implementierungskosten erheblich
- Geringere Wartungskosten und einfachere Wartung, da ein Sensor gewartet oder ausgetauscht werden kann, ohne dass andere Sensoren außer Betrieb genommen werden müssen
- Das herkömmliche Übersprechen, das bei der 6-DOF-Lösung auftritt, wird nahezu eliminiert.
- Flexibilität bei benutzerdefinierten Geometrien für eingebettete Elektronik (analog, SPI, etc.)
- Flexibilität bei der Elektronik, um Fehlererkennung einzubinden und Redundanz hinzuzufügen
- Geringes Gewicht - Jeder Gelenkdrehmomentsensor wiegt etwa 30 Gramm (einschließlich Kabel), im Vergleich zu ~400 Gramm bei herkömmlichen 6 DoF F/T-Sensoren.
- Stabilität bei hohen Temperaturen
- Gute Linearität und Wiederholgenauigkeit
- Mehr Daten verfügbar, bessere Auflösung durch separate Sensoren an jedem Gelenk
- Große Öffnung/Loch/ID - leichteres Durchführen von Kabeln und Werkzeugen
Die Nachfrage nach kollaborierenden Robotern (auch Cobots genannt) wächst schnell, da sie eine praktikable Lösung für den gravierenden Arbeitskräftemangel darstellen, der die Lieferketten belastet und das Wirtschaftswachstum behindert. Cobots müssen jedoch auch sicher mit Menschen zusammenarbeiten. Die FUTEK-Ingenieure haben einen Cobot-Drehmomentsensor entwickelt, der funktionale Sicherheit in der Mensch-Roboter-Zusammenarbeit mit erhöhter Genauigkeit und Geschwindigkeit bietet.
Die FUTEK-Drehmomentsensoren für harmonische Verzahnungen (Dehnungswellengetriebe Drehmomentsensor) können so angepasst werden, dass sie die Anforderungen der ISO13849-Normen für funktionale Sicherheit erfüllen.
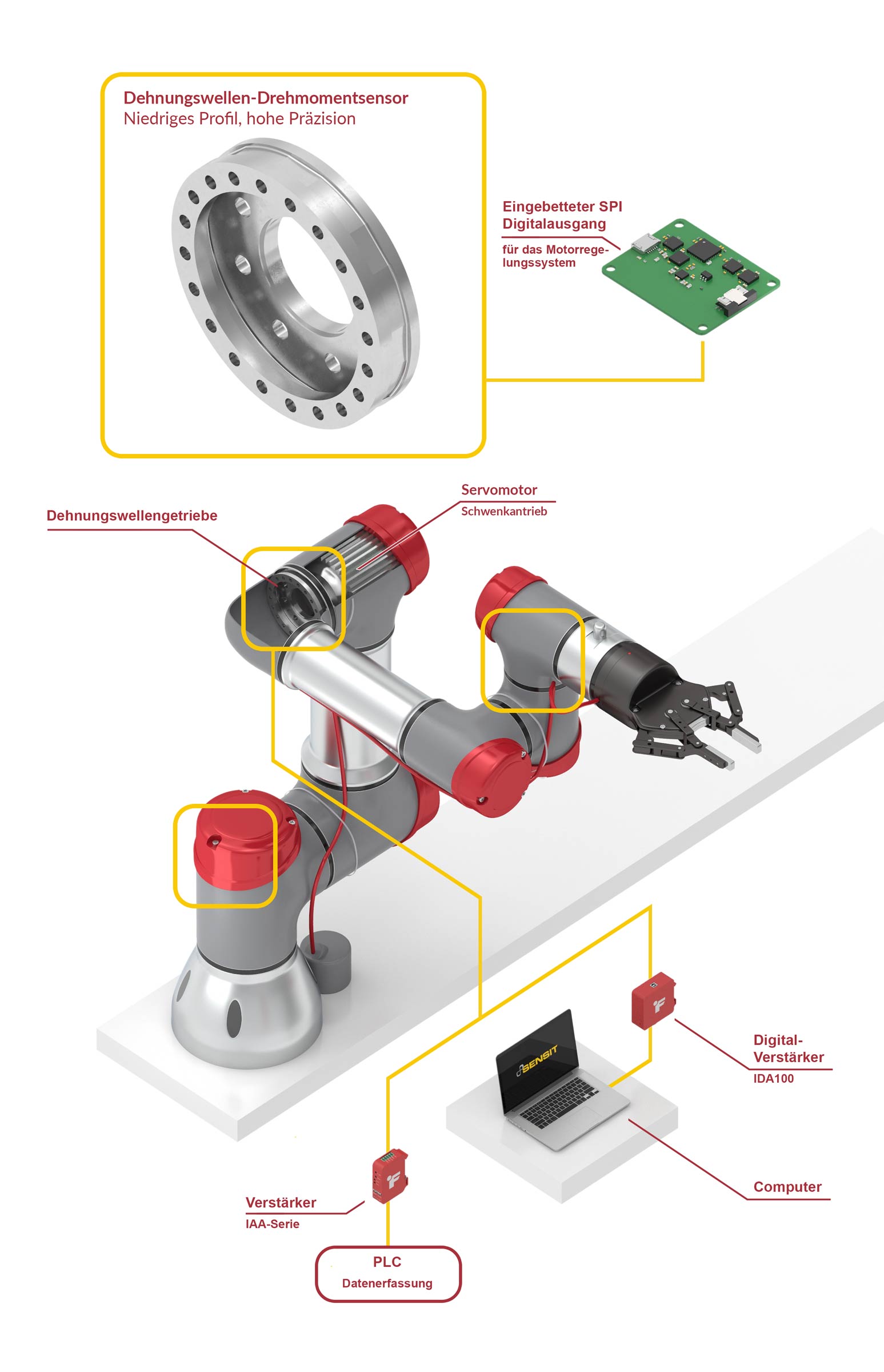
How it Works
Der Drehmomentsensor des Dehnungswellengetriebes wird zwischen dem Dehnungswellengetriebe des Roboterarms und seinen Befestigungspunkten montiert.
Der Drehmomentsensor misst das während der Armbewegung abgegebene Drehmoment, das dann durch den Verstärker der Serie IAA, IDA100 oder den digitalen Mehrkanal-SPI-Ausgang QIA verstärkt wird.
Das verstärkte Signal wird dann an die SPS oder die Steuerung des Roboterarms weitergeleitet, was eine hochpräzise Drehmomentrückmeldung und einen geschlossenen Regelkreis ermöglicht.
Darüber hinaus kann mit dem IDA100 die verstärkte Ausgabe des Sensors überwacht und die Einstellungen des analogen Verstärkers mit der SENSIT™ Software von FUTEK digital angepasst werden.
Products in Use
Leichte, flache und hochpräzise Dehnungswellen-Drehmomentsensoren (i.e. Dehnungswellengetriebe Drehmomentsensor), gepaart mit Analogverstärkern der Serie IAA, dem Signalaufbereiter IDA100 oder dem digitalen Mehrkanal-SPI-Ausgang QIA.


Contact Us
Please Contact Us with questions.
Bei Roboterarm-Anwendungen, die hohe Präzision und Kontrolle erfordern, z. B. in der chirurgischen Robotik, können Ingenieure ein Dehnungswellengetriebe einsetzen (Dehnungswellengetriebe Drehmomentsensor), um die Leistung des Roboters zu verbessern.
Vorteile des Dehnungswellengetriebes bei Roboterarmanwendungen:
- Verringert die Trägheit des Roboterarms und verbessert die dynamische Leistung durch schnellere Beschleunigung und kürzere Einschwingzeit.
- Bietet hohe Untersetzungsverhältnisse in einer einzigen Stufe und ein sehr geringes Umkehrspiel.
- Erhöht die Nutzlastkapazität und reduziert den Energiebedarf.
Das FUTEK-Drehmoment-Engineering-Team verfügt über umfassendes Know-how bei der kundenspezifischen Anpassung von harmonischen Dehnungswellen-Getriebedrehmomentsensoren (Dehnungswellengetriebe Drehmomentsensor) mit niedrigem Profil und hoher Präzision für alle Roboteranwendungen, die Dehnungswellen-Getriebetechnologie verwenden.
Vorteile von Dehnungswellen-Drehmomentsensoren mit harmonischer Verzahnung bei Roboterarm-Anwendungen:
- Unterstützt Bewegungssteuerung mit geringem Stromverbrauch
- Geringes Gewicht, niedriges Profil und hochpräzise Funktionen für Closed-Loop-Feedback
- Hohe Flexibilität in Geometrie und Design
- Kann auf die Gelenke des Roboterarms verteilt werden, was das Gesamtträgheitsmoment und den Stromverbrauch des Roboterarms reduziert
Eine Alternative zu Sechs-Grad-Freiheitsgrad-Sensoren
Harmonische Dehnungswellensensoren haben auch einzigartige Fähigkeiten, die sie zu einer Alternative zu Sensoren mit sechs Freiheitsgraden (6 DOF) für bestimmte Arten von hochpräzisen Roboterarmen machen, z. B. für die minimal-invasive Roboterchirurgie.
Bei einigen laparoskopischen Eingriffen müssen die Chirurgen beispielsweise die Position des Endeffektors (das Instrument in der Bauchhöhle) halten, während sich der Roboterarm bewegt. Dieses Manöver lässt sich nur schwer mit 6 DOF-Sensoren durchführen, da eine Drehmomentmessung an jedem Gelenk erforderlich ist, um die Richtung und die Größe der äquivalenten Kraft auf der Grundlage des Ausgangs jedes Gelenkdrehmoments korrekt zu berechnen.
Weitere Vorteile der Verwendung eines harmonischen Dehnungswellensensors als Alternative zu 6 DOF-Sensoren:
- Weniger kostspielig in der Umsetzung, da die Drehmomentmessung nur für ausgewählte Verbindungen durchgeführt werden kann
- Ein einziger Kanal pro Gelenk reduziert die Lernkurve und versteckte Implementierungskosten erheblich
- Geringere Wartungskosten und einfachere Wartung, da ein Sensor gewartet oder ausgetauscht werden kann, ohne dass andere Sensoren außer Betrieb genommen werden müssen
- Das herkömmliche Übersprechen, das bei der 6-DOF-Lösung auftritt, wird nahezu eliminiert.
- Flexibilität bei benutzerdefinierten Geometrien für eingebettete Elektronik (analog, SPI, etc.)
- Flexibilität bei der Elektronik, um Fehlererkennung einzubinden und Redundanz hinzuzufügen
- Geringes Gewicht - Jeder Gelenkdrehmomentsensor wiegt etwa 30 Gramm (einschließlich Kabel), im Vergleich zu ~400 Gramm bei herkömmlichen 6 DoF F/T-Sensoren.
- Stabilität bei hohen Temperaturen
- Gute Linearität und Wiederholgenauigkeit
- Mehr Daten verfügbar, bessere Auflösung durch separate Sensoren an jedem Gelenk
- Große Öffnung/Loch/ID - leichteres Durchführen von Kabeln und Werkzeugen
Die Nachfrage nach kollaborierenden Robotern (auch Cobots genannt) wächst schnell, da sie eine praktikable Lösung für den gravierenden Arbeitskräftemangel darstellen, der die Lieferketten belastet und das Wirtschaftswachstum behindert. Cobots müssen jedoch auch sicher mit Menschen zusammenarbeiten. Die FUTEK-Ingenieure haben einen Cobot-Drehmomentsensor entwickelt, der funktionale Sicherheit in der Mensch-Roboter-Zusammenarbeit mit erhöhter Genauigkeit und Geschwindigkeit bietet.
Die FUTEK-Drehmomentsensoren für harmonische Verzahnungen (Dehnungswellengetriebe Drehmomentsensor) können so angepasst werden, dass sie die Anforderungen der ISO13849-Normen für funktionale Sicherheit erfüllen.