Why is it important to control robot gripping force?
One of the main challenges facing the robotic industry today is that the dexterity of the fingers precludes conventional robotic systems from doing about 95% of all manual jobs.
Preparing a drink, folding a napkin, cleaning a chandelier, etc. requires extreme dexterity. Replacing these types of manual labor with robots requires accurately measuring and controlling the robot’s grasping force to increase dexterity and to make sure that fragile objects are not crushed by the gripper (i.e. semiconductor wafer handling ). Although load cells are reliable sensors for force measurement, they have historically been limited by their bulky construction.
To solve this problem, FUTEK has designed and developed a NanoSensor. Its minuscule geometry of 4 mm x 5 mm fits in the majority of the end-effector grip applications without sacrificing the reliability and precision of standard load cells. Due to its lightweight construction, it offers a high natural frequency response, making it suitable for dynamic force measurement applications.
FUTEK’s Nanosensors are customized to suit unique OEM solutions. COTS sensors are also available for proof of concept and low-volume R&D applications.
Benefits of FUTEK NanoSensor:
- ±0.5% nonlinearity of rated output (RO) in 5lb and 10lb;
- Up to 200% safe overload;
- Custom IP67 and autoclavable sensors;
- Tension and compression force sensor;
- Ultra-low deflection (0.0002” [0.005 mm]);
- High natural frequency response up to 98KHz.
- M1 threaded double-sided mounting provisions;
- 1000 Ohm full-bridge side load (off axis or extraneous loads) compensated instrumentation;
- Laser-welded construction;
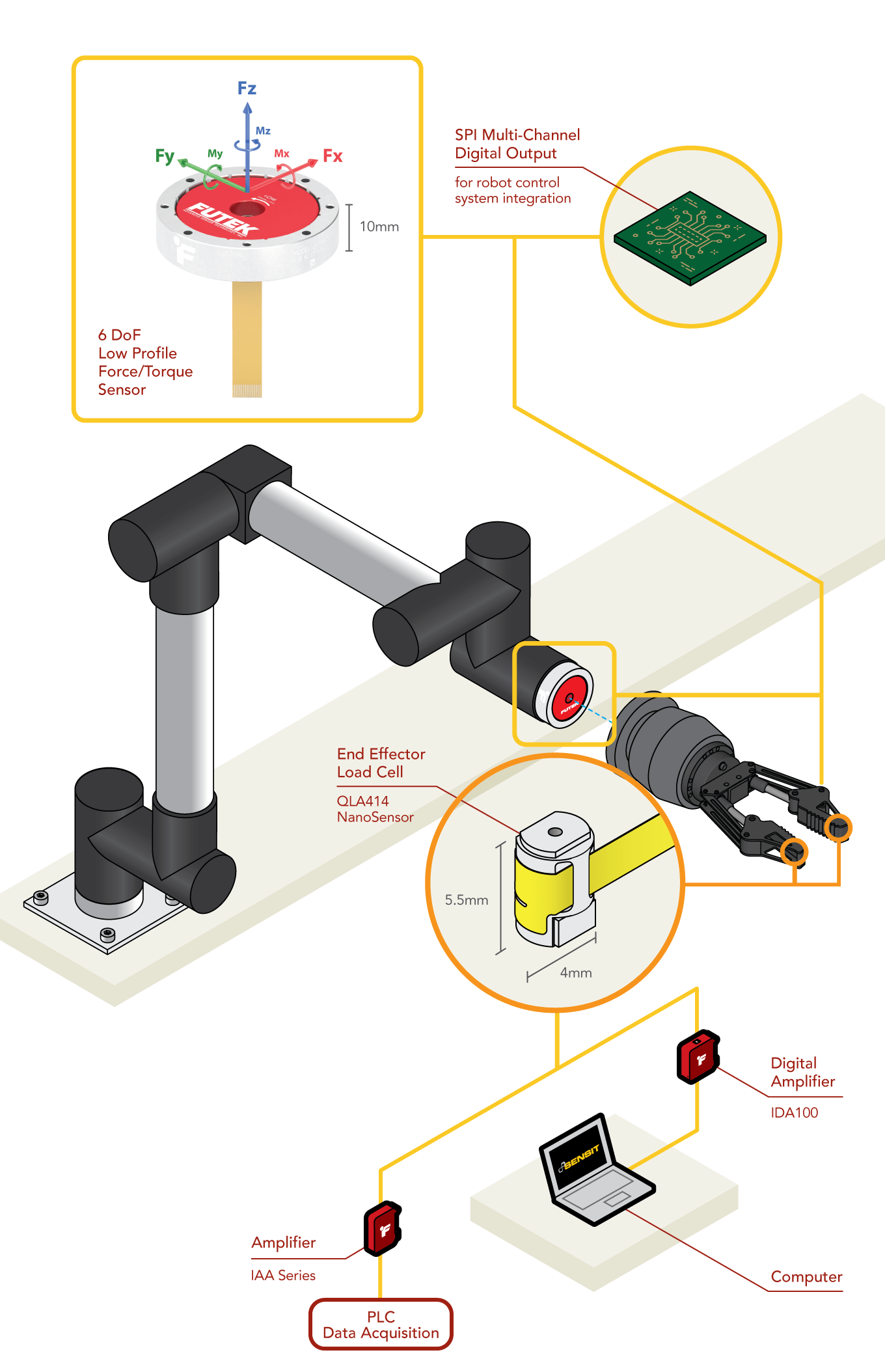
How it Works
The NanoSensor is mounted in the gripper of the the robot end effector. They can be fully customizable to suit unique OEM grip applications.
The NanoSensor captures the gripping forces generated by the end-effector. The sensor signal output signal is then conditioned, amplified and digitized by the USB Series , IDA100 amplifier or QIA Multi-Channel SPI Digital Output.
The instrument signal is then sent to the PLC, Desktop PC or robotic arm controller, providing high precision gripping force feedback and allowing closed control loop system.
Additionally, with the IDA100, amplified output from the sensor can be monitored and analog amplifier settings can be adjusted digitally with FUTEK's SENSIT™ Software.
Products in Use
Minuscule geometry 4 mm x 5 mm high-precision NanoSensor QLA414, paired with one of the following signal conditioners:
- QIA125 - 3 Channel Low Power SPI Digital Output;
- QIA131 - 6 Channel High Resolution SPI Digital Output;
- USB Series - Internal PCB with USB Digital Output;
- IAA Series Analog amplifiers.



Contact Us
Please Contact Us with questions.
Why is it important to control robot gripping force?
One of the main challenges facing the robotic industry today is that the dexterity of the fingers precludes conventional robotic systems from doing about 95% of all manual jobs.
Preparing a drink, folding a napkin, cleaning a chandelier, etc. requires extreme dexterity. Replacing these types of manual labor with robots requires accurately measuring and controlling the robot’s grasping force to increase dexterity and to make sure that fragile objects are not crushed by the gripper (i.e. semiconductor wafer handling ). Although load cells are reliable sensors for force measurement, they have historically been limited by their bulky construction.
To solve this problem, FUTEK has designed and developed a NanoSensor. Its minuscule geometry of 4 mm x 5 mm fits in the majority of the end-effector grip applications without sacrificing the reliability and precision of standard load cells. Due to its lightweight construction, it offers a high natural frequency response, making it suitable for dynamic force measurement applications.
FUTEK’s Nanosensors are customized to suit unique OEM solutions. COTS sensors are also available for proof of concept and low-volume R&D applications.
Benefits of FUTEK NanoSensor:
- ±0.5% nonlinearity of rated output (RO) in 5lb and 10lb;
- Up to 200% safe overload;
- Custom IP67 and autoclavable sensors;
- Tension and compression force sensor;
- Ultra-low deflection (0.0002” [0.005 mm]);
- High natural frequency response up to 98KHz.
- M1 threaded double-sided mounting provisions;
- 1000 Ohm full-bridge side load (off axis or extraneous loads) compensated instrumentation;
- Laser-welded construction;