What is a tactile sensor?
A tactile sensor (aka fingertip force sensor) is a device that measures the forces in response to the physical interaction with the environment. The sense of touch in humans is modeled based on the biological sense of touch provoked by the mechanical stimulation of the skin. Tactile sensors are used in robotics, computer hardware, and security systems. A common application of tactile sensors is in robotic hands and fingers (i.e. robotic tactile sensing).
Why are Tactile Sensors so important in robotic applications?
One of the main challenges facing the robotic industry today is that the dexterity of the fingers precludes conventional robotic systems from doing about 95% of all manual jobs. Preparing a drink, folding a napkin, cleaning a chandelier, etc. requires extreme dexterity. Replacing these types of manual labor with robots requires accurately measuring and controlling the robot’s grasping force to increase dexterity and to make sure that fragile objects are not crushed by the gripper (i.e. semiconductor wafer handling ). Although load cells are reliable sensors for force measurement, they have historically been limited by their bulky construction.
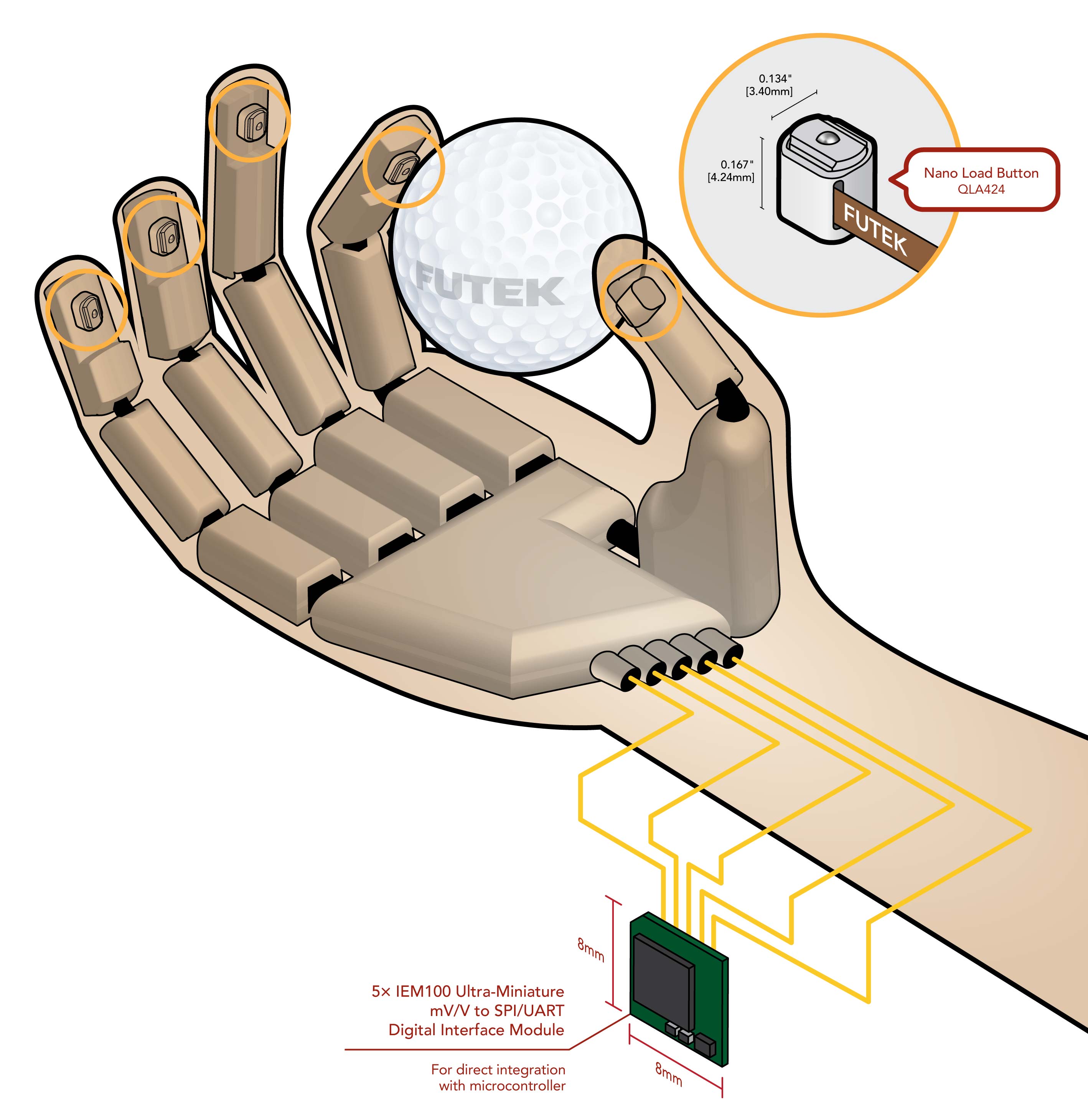
Multiple Nano Load Button Load Cells are utilized as a tactile sensor to measure the tactile force produced by an industrial robot. By integrating these micro load buttons into robotic arms end effectors (aka EOAT or end-of-arm tolling), grippers or even humanoids hands, researchers can accurately monitor and adjust the applied force, ensuring sensible objects are handled with care. The QLA424 model with only 3.91 mm diameter x 4.24 mm height and ±0.5% nonlinearity is particularly well-suited for high-precision tasks in R&D or niche applications, such as industrial grippers or end-effectors that perform specific functions.
QIA128 - Miniature and Low Power Digital Signal Conditioning
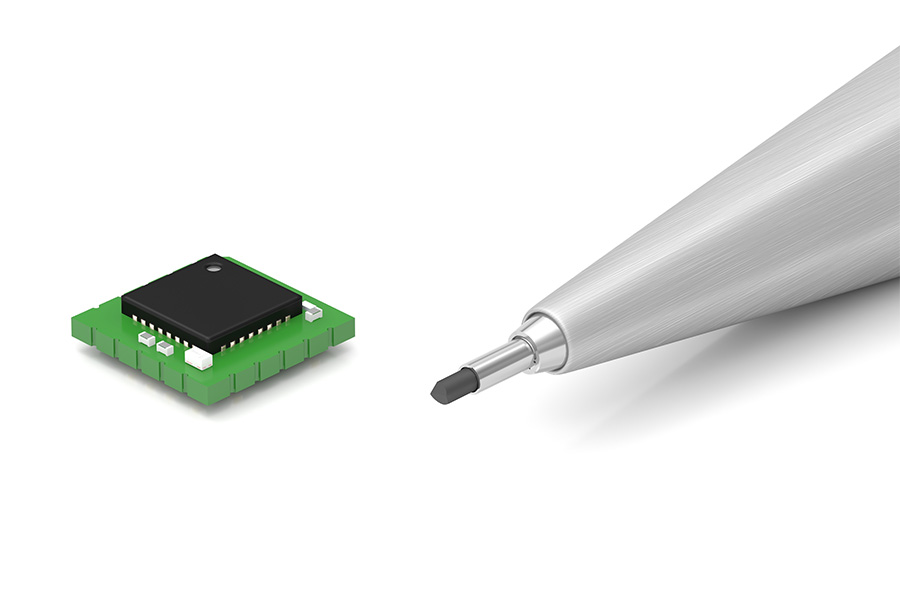
The QIA128 is an ideal signal conditioning solution for tactile robotic sensors, offering a compact design with a footprint of just 8 mm x 8 mm, making it perfect for applications where space is limited. Its ultra-low power consumption of only 60 mW ensures efficient operation, while the high sampling rate of up to 1300 samples per second (SPS) combined with up to 18.4 Bits of Noise Free Resolution (NFR) enables precise and reliable signal processing. The QIA128 also features SPI/UART digital output interfaces, allowing seamless integration into advanced robotic systems where accurate force measurement and minimal assembly space are critical.
How it Works
As research laboratories continue to explore the world of robotics, there exists a greater necessity for high precision test and measurement products, specially in the robotic tactile sensing space.
This application illustrates five Nano Load Buttons (aka fingertip force sensor) mounted to the tip of each robotic finger. As the robotic hand manipulates different objects, the force require to handle those particular objects is collected by the tactile sensors.
Integrating Nano Load Buttons with QIA128 provides compact, efficient, and precise signal conditioning for tactile robotic sensors, featuring high sampling rates, excellent resolution, low power consumption, and seamless digital output for space-constrained robotic applications.

Contact Us
Please Contact Us with questions.
What is a tactile sensor?
A tactile sensor (aka fingertip force sensor) is a device that measures the forces in response to the physical interaction with the environment. The sense of touch in humans is modeled based on the biological sense of touch provoked by the mechanical stimulation of the skin. Tactile sensors are used in robotics, computer hardware, and security systems. A common application of tactile sensors is in robotic hands and fingers (i.e. robotic tactile sensing).
Why are Tactile Sensors so important in robotic applications?
One of the main challenges facing the robotic industry today is that the dexterity of the fingers precludes conventional robotic systems from doing about 95% of all manual jobs. Preparing a drink, folding a napkin, cleaning a chandelier, etc. requires extreme dexterity. Replacing these types of manual labor with robots requires accurately measuring and controlling the robot’s grasping force to increase dexterity and to make sure that fragile objects are not crushed by the gripper (i.e. semiconductor wafer handling ). Although load cells are reliable sensors for force measurement, they have historically been limited by their bulky construction.
Multiple Nano Load Button Load Cells are utilized as a tactile sensor to measure the tactile force produced by an industrial robot. By integrating these micro load buttons into robotic arms end effectors (aka EOAT or end-of-arm tolling), grippers or even humanoids hands, researchers can accurately monitor and adjust the applied force, ensuring sensible objects are handled with care. The QLA424 model with only 3.91 mm diameter x 4.24 mm height and ±0.5% nonlinearity is particularly well-suited for high-precision tasks in R&D or niche applications, such as industrial grippers or end-effectors that perform specific functions.
QIA128 - Miniature and Low Power Digital Signal Conditioning
The QIA128 is an ideal signal conditioning solution for tactile robotic sensors, offering a compact design with a footprint of just 8 mm x 8 mm, making it perfect for applications where space is limited. Its ultra-low power consumption of only 60 mW ensures efficient operation, while the high sampling rate of up to 1300 samples per second (SPS) combined with up to 18.4 Bits of Noise Free Resolution (NFR) enables precise and reliable signal processing. The QIA128 also features SPI/UART digital output interfaces, allowing seamless integration into advanced robotic systems where accurate force measurement and minimal assembly space are critical.