¿Qué es un sensor fuerza par de 6 ejes?
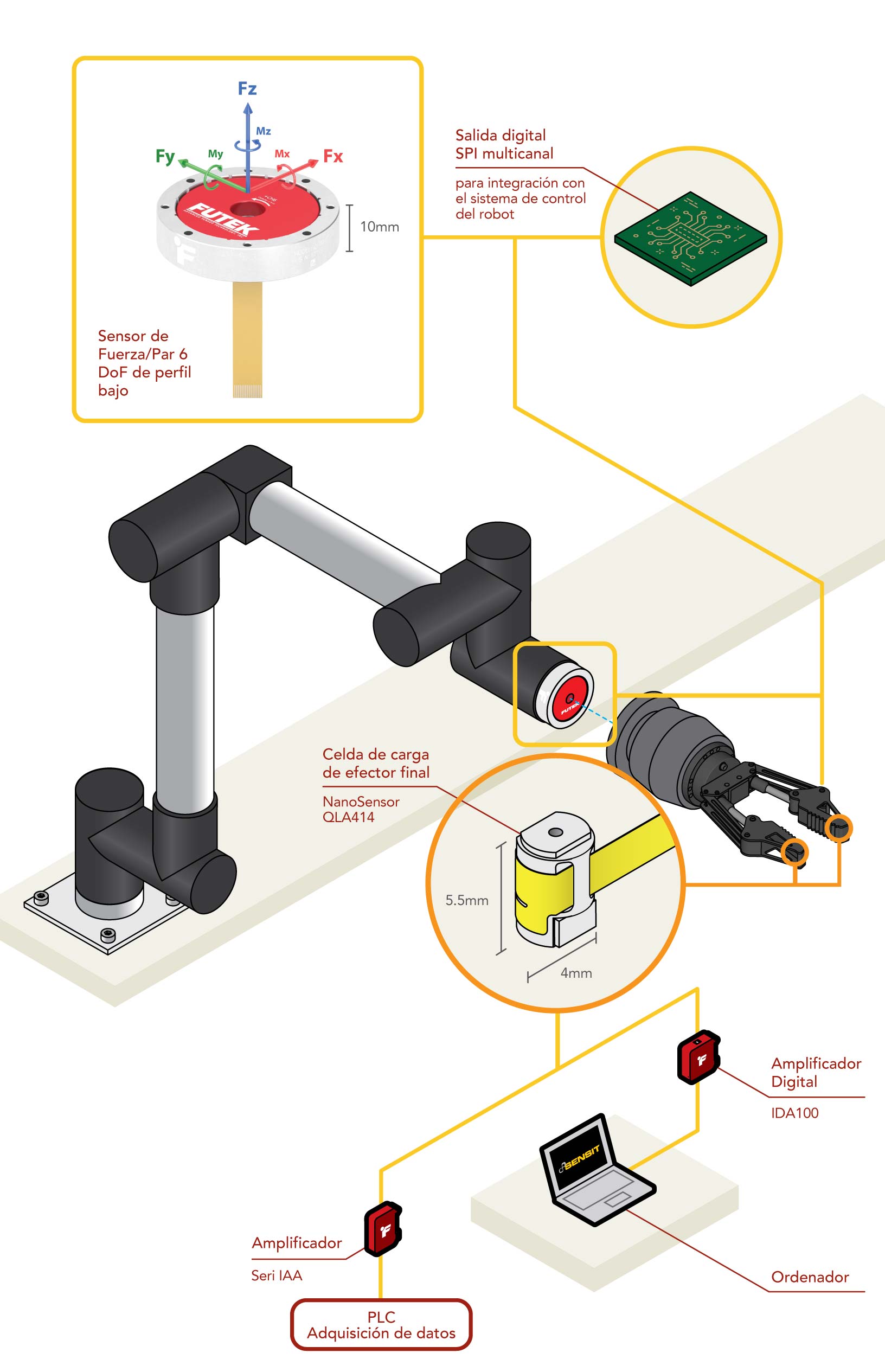
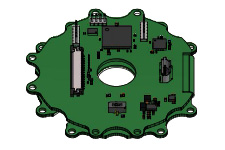
Un sensor 6 DoF (6 grados de libertad) es un dispositivo utilizado para asegurar la precisión en aplicaciones robotizadas. El sensor de 6 ejes está diseñado para las articulaciones de los robots y se fija habitualmente en la muñeca del brazo robotizado para proporcionar una medida precisa de las fuerzas en las tres coordenadas geométricas (±Fx, ±Fy, ±Fz) y los momentos o pares correspondientes (±Mx, ±My, ±Mz). Un transductor de fuerza y par es también conocido como un transductor multieje de fuerza y par, celda de carga multieje, sensor Fuerza/Par, o celda de carga de 6 ejes (or celula de carga de 6 ejes).
¿Qué aplicaciones requiere lecturas de fuerza y par en 6 ejes?
Los sensores de fuerza y par son utilizados en el ensayo de productos, en robots de ensamblaje, esmerilado, pulido y otras aplicaciones industriales en las que es necesario mantener una posición de forma estable y una alta repetibilidad en las trayectorias. Este sensor es particularmente importante en operaciones de ensamblaje complejas en las que los robots se enfrentan a distintos problemas (desalineación, ajuste preciso, test de fuerza, etc.) y donde es fundamental tener un control preciso de la fuerza aplicada con la herramienta del final del brazo del robot (efector final). La celda de carga de 6 ejes permite que el controlador reconozca que está ocurriendo en la herramienta robot y mejorar la sensibilidad efector final.
En la industria de los dispositivos médicos, los sensores de seis grados de libertad son utilizado en aplicaciones para feedback táctil en robots quirúrgicos, instrumentos táctiles para laparoscopias, y en muchas otras aplicaciones.
El guiado manual es una aplicación en la que las medidas de par son necesarias. A medida que el operador guía el efector final (herramienta robot) para enseñarle una trayectoria específica, se genera un par en la herramienta robot que es leído por el sensor de fuerza y par de seis ejes. Esto pares multieje son medidos después en todas las direcciones cartesianas y la señal puede ser enviada a un ordenador para su análisis.
Beneficios de los sensores Fuerza/Par 6 DoF de FUTEK:
- Bajo peso
- Bajo perfil
- Dispositivos electrónicos embebidos de alta resolución
- Rangos específicos de sobrecarga personalizables
- Redundancia y detección de errores personalizables
- Personalizables para consumos de energía bajos
- Alta precisión de cero y estabilidad de temperatura
¿Por qué es importante controlar la fuerza de agarre de un robot?
En algunas aplicaciones puede ser necesario medir y controlar de forma precisa la fuerza de apriete del robot para asegurar que los objetos frágiles no son dañados por la garra (por ejemplo, en la manipulación de obleas de semiconductores). Aunque las celdas de carga son sensores de medida de fuerza muy fiables, históricamente han estado limitados por su estructura voluminosa.
Para resolver este problema, FUTEK ha diseñado y desarrollado un Nanosensor. Su diminuta geometría de 4 mm x 5 mm se ajusta a la mayoría de las aplicaciones de agarre con efector final sin sacrificar la fiabilidad y la precisión de las celdas de carga estándar. Debido a su estructura ligera, ofrecen una alta frecuencia natural de respuesta, convirtiéndolas en una solución adecuada para aplicaciones en las que se producen cambios rápidos de fuerza. Los nanosensores FUTEK están personalizados para ajustarse a las soluciones OEM (soluciones de fabricantes de equipos originales). Además, se encuentran disponibles sistemas comerciales para aplicaciones de prueba de concepto o I+D.
How it Works
El sensor de fuerza de 6 grados de libertad se instala en una de las articulaciones del robot o en la muñeca (última articulación antes de efector final).
El sensor 6 DoF captura las fuerzas y pares de salida generados durante el movimiento del brazo. La señal de salida del sensor es acondicionada, amplificada y digitalizada por la serie USB, el amplificador IDA100 o el dispositivo QIA multicanal de salida SPI digital.
La señal se envía posteriormente al PLC, ordenador de sobremesa o al controlador del brazo robótico, proporcionando un feedback de alta precisión de la fuerza y el par, y permitiendo el control a través de un sistema de retroalimentación cerrado.
Adicionalmente, utilizando el dispositivo IDA100, la salida amplificada del sensor puede ser monitorizada y los ajustes del amplificador analógico puede ser ajustados digitalmente con el software FUTEK SENSIT™.




Contact Us
Please Contact Us with questions.
¿Qué es un sensor fuerza par de 6 ejes?
Un sensor 6 DoF (6 grados de libertad) es un dispositivo utilizado para asegurar la precisión en aplicaciones robotizadas. El sensor de 6 ejes está diseñado para las articulaciones de los robots y se fija habitualmente en la muñeca del brazo robotizado para proporcionar una medida precisa de las fuerzas en las tres coordenadas geométricas (±Fx, ±Fy, ±Fz) y los momentos o pares correspondientes (±Mx, ±My, ±Mz). Un transductor de fuerza y par es también conocido como un transductor multieje de fuerza y par, celda de carga multieje, sensor Fuerza/Par, o celda de carga de 6 ejes (or celula de carga de 6 ejes).
¿Qué aplicaciones requiere lecturas de fuerza y par en 6 ejes?
Los sensores de fuerza y par son utilizados en el ensayo de productos, en robots de ensamblaje, esmerilado, pulido y otras aplicaciones industriales en las que es necesario mantener una posición de forma estable y una alta repetibilidad en las trayectorias. Este sensor es particularmente importante en operaciones de ensamblaje complejas en las que los robots se enfrentan a distintos problemas (desalineación, ajuste preciso, test de fuerza, etc.) y donde es fundamental tener un control preciso de la fuerza aplicada con la herramienta del final del brazo del robot (efector final). La celda de carga de 6 ejes permite que el controlador reconozca que está ocurriendo en la herramienta robot y mejorar la sensibilidad efector final.
En la industria de los dispositivos médicos, los sensores de seis grados de libertad son utilizado en aplicaciones para feedback táctil en robots quirúrgicos, instrumentos táctiles para laparoscopias, y en muchas otras aplicaciones.
El guiado manual es una aplicación en la que las medidas de par son necesarias. A medida que el operador guía el efector final (herramienta robot) para enseñarle una trayectoria específica, se genera un par en la herramienta robot que es leído por el sensor de fuerza y par de seis ejes. Esto pares multieje son medidos después en todas las direcciones cartesianas y la señal puede ser enviada a un ordenador para su análisis.
Beneficios de los sensores Fuerza/Par 6 DoF de FUTEK:
- Bajo peso
- Bajo perfil
- Dispositivos electrónicos embebidos de alta resolución
- Rangos específicos de sobrecarga personalizables
- Redundancia y detección de errores personalizables
- Personalizables para consumos de energía bajos
- Alta precisión de cero y estabilidad de temperatura
¿Por qué es importante controlar la fuerza de agarre de un robot?
En algunas aplicaciones puede ser necesario medir y controlar de forma precisa la fuerza de apriete del robot para asegurar que los objetos frágiles no son dañados por la garra (por ejemplo, en la manipulación de obleas de semiconductores). Aunque las celdas de carga son sensores de medida de fuerza muy fiables, históricamente han estado limitados por su estructura voluminosa.
Para resolver este problema, FUTEK ha diseñado y desarrollado un Nanosensor. Su diminuta geometría de 4 mm x 5 mm se ajusta a la mayoría de las aplicaciones de agarre con efector final sin sacrificar la fiabilidad y la precisión de las celdas de carga estándar. Debido a su estructura ligera, ofrecen una alta frecuencia natural de respuesta, convirtiéndolas en una solución adecuada para aplicaciones en las que se producen cambios rápidos de fuerza. Los nanosensores FUTEK están personalizados para ajustarse a las soluciones OEM (soluciones de fabricantes de equipos originales). Además, se encuentran disponibles sistemas comerciales para aplicaciones de prueba de concepto o I+D.