How to measure torque of a servo motor?
A relatively simple method to estimate DC servo motor torque is to measure its electrical power input, the voltage and the current in the power line driving the servo drive. For most motors, torque is directly proportional to the current and can be derived from it by knowing shaft speed and motor efficiency. This is considered an indirect measurement of torque since it is not the true mechanical torque but instead a relation from electrical power quantities to a theoretical and estimated torque value.
However, for a precise and accurate shaft output torque measurement, a reaction torque sensor is the recommended method.
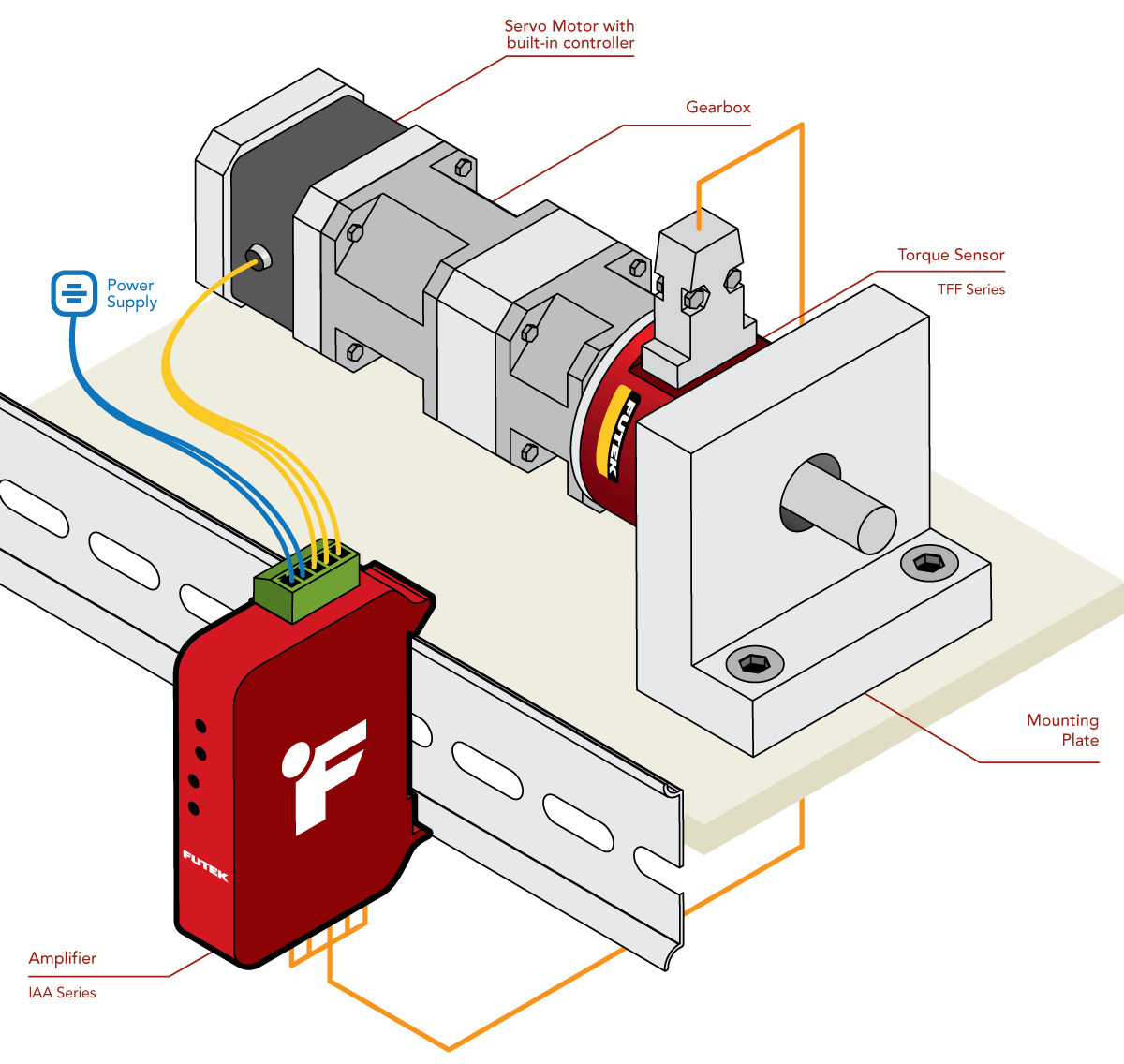
Automated systems in a variety of different industries rely on servo motors to monitor linear and rotational motion. Frictional loss and motor speed change necessitate the inclusion of a closed loop control system. To accomplish this, place a reaction torque sensor between the servo gearbox and its mounting location to measure the generated torque.
How it Works
FUTEK's TFF500 Reaction Torque Sensor is mounted between a CGI Prime 017PLX Planetary Angle Gearhead and the gearhead’s mounting location.
Tmotor = Torque applied by the motor + gearbox;
Treaction = Reaction torque measured by the FUTEK Reaction Torque Sensors that keeps the motor stator/body from spinning ;
Treaction = -Tmotor.As the servo motor runs, the torque produced and transmitted through the NEMA 17 gearhead is measured by the TFF500 (servo motor torque feedback).
The IAA analog amplifier amplifies the TFF500 signal for input into a PLC for closed loop control of torque.
Products in Use
FUTEK's TFF500 Reaction Torque Sensor with Thru Hole Center paired with an IAA Series Analog Amplifier for torque control of servo motor.
NOTE: The TFF500 fits on any gearbox that maintains the NEMA 17 mounting pattern ( 4x 4-40 bolt hole on a 1.725” BCD). The only requirement would be that the gearbox needs to have the clearance holes for the 4-40 screw, rather than the tapped female threads. Customization available upon request. Contact factory.


Contact Us
Please Contact Us with questions.
How to measure torque of a servo motor?
A relatively simple method to estimate DC servo motor torque is to measure its electrical power input, the voltage and the current in the power line driving the servo drive. For most motors, torque is directly proportional to the current and can be derived from it by knowing shaft speed and motor efficiency. This is considered an indirect measurement of torque since it is not the true mechanical torque but instead a relation from electrical power quantities to a theoretical and estimated torque value.
However, for a precise and accurate shaft output torque measurement, a reaction torque sensor is the recommended method.
Automated systems in a variety of different industries rely on servo motors to monitor linear and rotational motion. Frictional loss and motor speed change necessitate the inclusion of a closed loop control system. To accomplish this, place a reaction torque sensor between the servo gearbox and its mounting location to measure the generated torque.