Was ist ein Taktile Sensoren?
Ein taktile Sensor ist ein Gerät, das die Kräfte als Reaktion auf die physische Interaktion mit der Umgebung misst für taktile messung. Der Tastsinn des Menschen ist dem biologischen Tastsinn nachempfunden, der durch die mechanische Stimulation der Haut hervorgerufen wird. Taktile Sensoren werden in der Robotik, bei Computerhardware und in Sicherheitssystemen eingesetzt. Eine gängige Anwendung für taktile Sensoren sind Roboterhände und -finger.
Warum sind Tastsensoren bei Roboteranwendungen so wichtig?
Eine der größten Herausforderungen, vor denen die Roboterindustrie heute steht, besteht darin, dass herkömmliche Robotersysteme aufgrund der Fingerfertigkeit etwa 95 % aller manuellen Tätigkeiten nicht ausführen können. Das Zubereiten eines Getränks, das Falten einer Serviette oder das Reinigen eines Kronleuchters erfordert extreme Geschicklichkeit. Wenn diese Art von Handarbeit durch Roboter ersetzt werden soll, muss die Greifkraft des Roboters genau gemessen und gesteuert werden, um die Geschicklichkeit zu erhöhen und sicherzustellen, dass zerbrechliche Gegenstände nicht vom Greifer zerquetscht werden (z. B. bei der Handhabung von Halbleiterwafern). Obwohl Wägezellen zuverlässige Sensoren für die Kraftmessung sind, wurden sie in der Vergangenheit durch ihre sperrige Konstruktion eingeschränkt.
Mehrere Load-Button-Wägezellen werden als taktiler Sensor eingesetzt, um die von einem Industrieroboter erzeugte taktile Kraft zu messen. FUTEK hat einen technischen Artikel verfasst, der die Verwendung von Wägezellen in Roboterprothesen und Greifern für die taktile Erfassung von Robotern beschreibt.
How it Works
In dem Maße, in dem Forschungslabors die Welt der Robotik erforschen, steigt auch der Bedarf an hochpräzisen Test- und Messprodukten, insbesondere im Bereich der taktilen Abtastung von Robotern. (Taktile Sensoren Roboter)
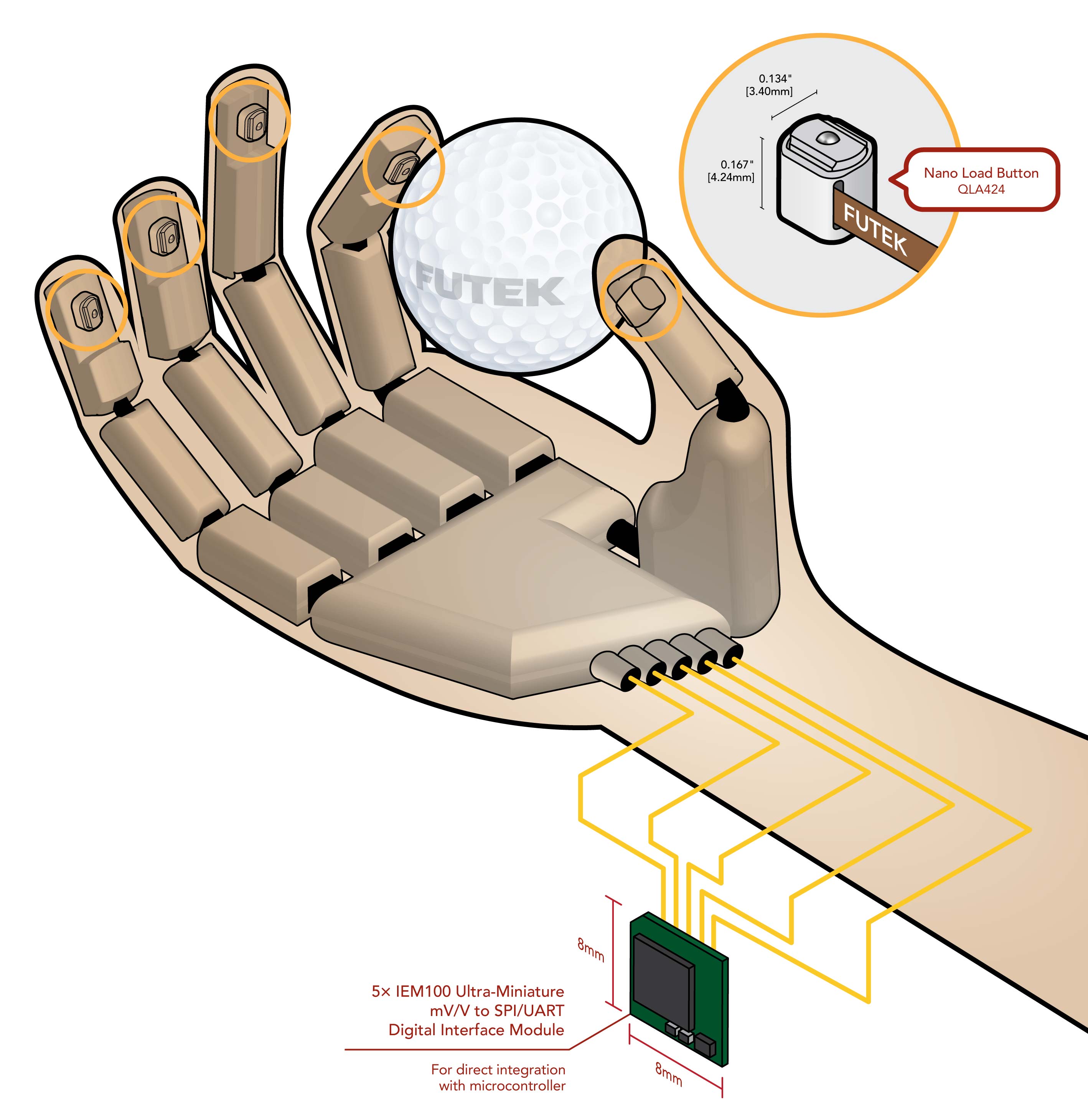
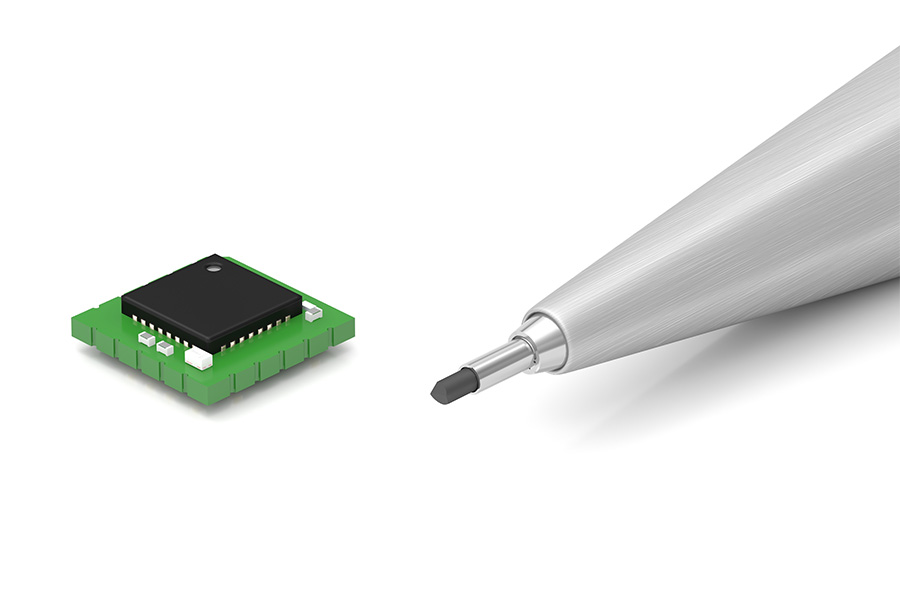
Diese Anwendung zeigt fünf Miniatur-Lastknöpfe (auch Fingerspitzen-Kraftsensor genannt), die an der Spitze jedes Roboterfingers angebracht sind (taktile messung). Während die Roboterhand verschiedene Objekte manipuliert, wird die für die Handhabung dieser Objekte erforderliche Kraft von den taktilen Sensoren erfasst.
Durch die Kopplung der USB-Lösung von FUTEK mit diesen Load Buttons können Forschungsingenieure die Mehrfachkraft direkt auf ihren PC übertragen.
Wenn ihr PC mit der SENSIT™ Test- und Messsoftware von FUTEK ausgestattet ist, können die Ingenieure alle Daten live grafisch darstellen und protokollieren.
Products in Use
Fünf Miniatur-Lasttaster (LLB-Serie) in Verbindung mit den USB-Lösungen von FUTEK und der SENSIT™ Test- und Messsoftware.



Contact Us
Please Contact Us with questions.
Was ist ein Taktile Sensoren?
Ein taktile Sensor ist ein Gerät, das die Kräfte als Reaktion auf die physische Interaktion mit der Umgebung misst für taktile messung. Der Tastsinn des Menschen ist dem biologischen Tastsinn nachempfunden, der durch die mechanische Stimulation der Haut hervorgerufen wird. Taktile Sensoren werden in der Robotik, bei Computerhardware und in Sicherheitssystemen eingesetzt. Eine gängige Anwendung für taktile Sensoren sind Roboterhände und -finger.
Warum sind Tastsensoren bei Roboteranwendungen so wichtig?
Eine der größten Herausforderungen, vor denen die Roboterindustrie heute steht, besteht darin, dass herkömmliche Robotersysteme aufgrund der Fingerfertigkeit etwa 95 % aller manuellen Tätigkeiten nicht ausführen können. Das Zubereiten eines Getränks, das Falten einer Serviette oder das Reinigen eines Kronleuchters erfordert extreme Geschicklichkeit. Wenn diese Art von Handarbeit durch Roboter ersetzt werden soll, muss die Greifkraft des Roboters genau gemessen und gesteuert werden, um die Geschicklichkeit zu erhöhen und sicherzustellen, dass zerbrechliche Gegenstände nicht vom Greifer zerquetscht werden (z. B. bei der Handhabung von Halbleiterwafern). Obwohl Wägezellen zuverlässige Sensoren für die Kraftmessung sind, wurden sie in der Vergangenheit durch ihre sperrige Konstruktion eingeschränkt.
Mehrere Load-Button-Wägezellen werden als taktiler Sensor eingesetzt, um die von einem Industrieroboter erzeugte taktile Kraft zu messen. FUTEK hat einen technischen Artikel verfasst, der die Verwendung von Wägezellen in Roboterprothesen und Greifern für die taktile Erfassung von Robotern beschreibt.