QSH01919 Low Profile & Light Weight 6DOF Force/Torque Sensor w/ Overload Protection
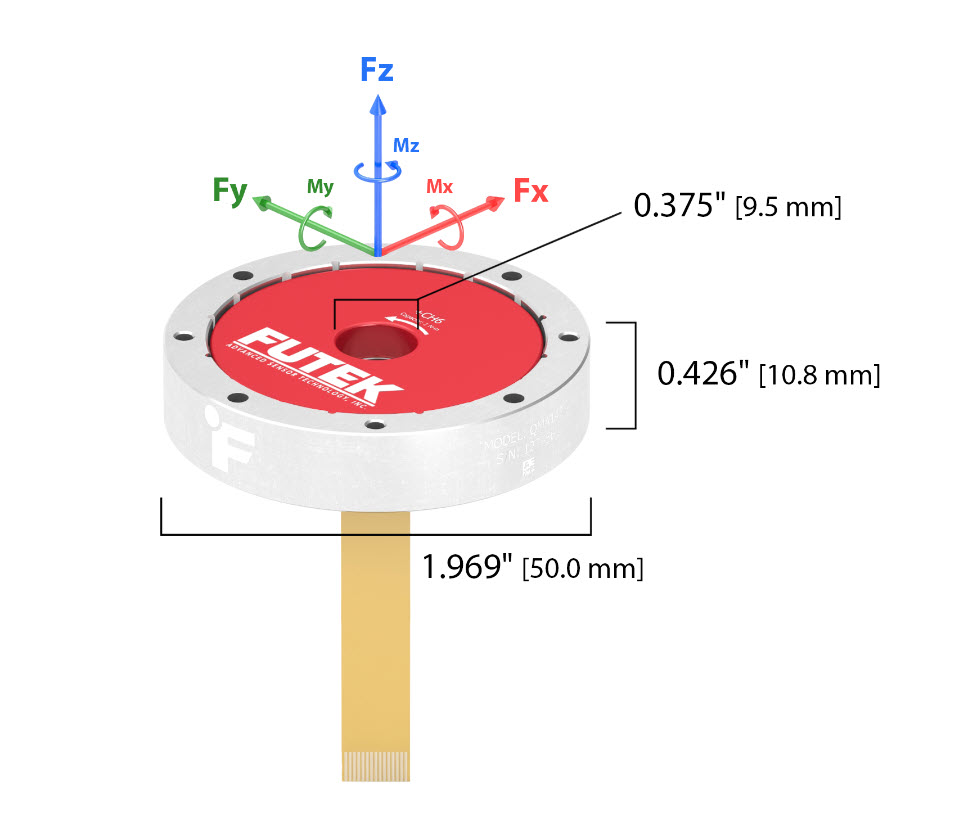

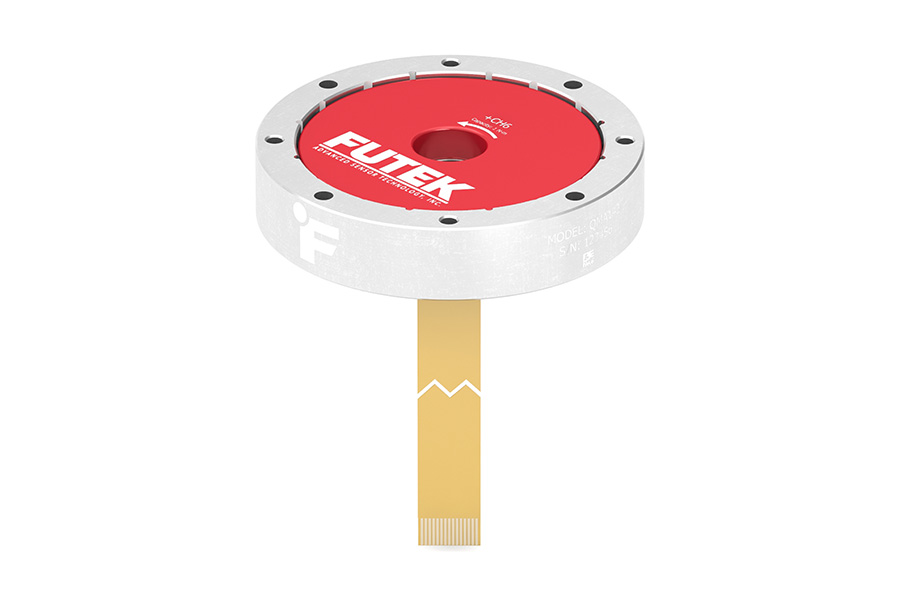

QMA142 Custom 6 Axis Sensor, Custom 6 DOF Multi-Axis Force-Torque Sensor, Ch Fx/Fy/Fz: 15 N; Ch Mx/My/Mz: 1 N-m, Dimensions: 1.96 in. OD x 0.375 in. ID x 0.4 in. H , Overload Protection, Material - Aluminum 2024-T4 , Cable - 15 Pin FFC , 0.5mm Pitch , 2 in. Long
A Multi-Component Sensor (aka force-torque transducer or multi-component load cell) designed to measure in all 3 spatial directions: forces in tension and compression (±Fx, ±Fy, and ±Fz) as well as torques or moments in clockwise and counterclockwise (±Mx, ±My or ±Mz). These special force torque sensors are equipped with multiple strain gage bridges that accurately measure the forces and torques applied in one direction with little or no cross-talk interference from force or moments applied in other directions.
Benefits of FUTEK 6 DoF Force/Torque Sensor:
- Light weight
- Low profile
- High resolution embedded electronics
- Customizable for specific overload protection range
- Customizable for redundancy and fault detection
- Customizable for low power consumption
- High Zero and temperature stability
Which applications require six axis force and torque readings?
6 Axis Force Sensors are used for product testing, robotic assembly, grinding, polishing, and other industrial applications where holding a steady position and trajectory high-repeatability is necessary. This sensor is particularly important in complex assembly operations where the robot will encounter different problems (misalignments, tight fits, force tests, etc) and precision motion control over the end-of-arm tooling (EOAT) applied force (robot end-effector) is paramount. The six axis load cell allows the controller to recognize what is going on with the robot tool and improves end-effector dexterity.
Features
- 6 degrees of freedom - Forces (Fx, Fy, Fz) and Moments / Torque (Mx, My, Mz);
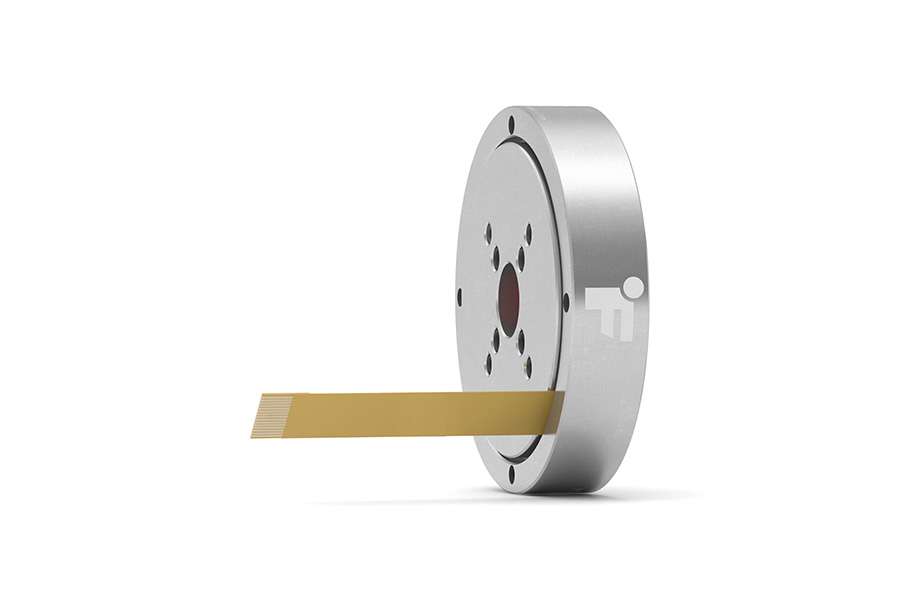
- Pass thru hole for cable routing;
- Miniature 6 Dof Sensor
- 10.8 mm height - Low Profile ;
- 50 mm OD
- 15 Pin 0.5 mm Pitch Flat Flex Cable (FFC);
- Lightweight Aluminum 2024-T4 Material - 40 grams;