Spinal cord injuries (SCI) often leave the patient with little to no ability to ever walk again. The Institute for Human and Machine Cognition (IHMC) aimed to help solve that with a powered bionic exoskeleton at the 2016 Cybathlon in Zurich, Switzerland. Their ingenious exoskeleton suit, named Mina v2, utilizes power actuators that strap to an individual’s legs, moving their hip, knee, and ankle joints, allowing an individual to walk unassisted.
Watch this video and learn directly from IHMC specialists how FUTEK Load Cell and Amplifiers are used to measure the actuator forces in the powered exoskeleton via a closed-loop control system for precise force control.
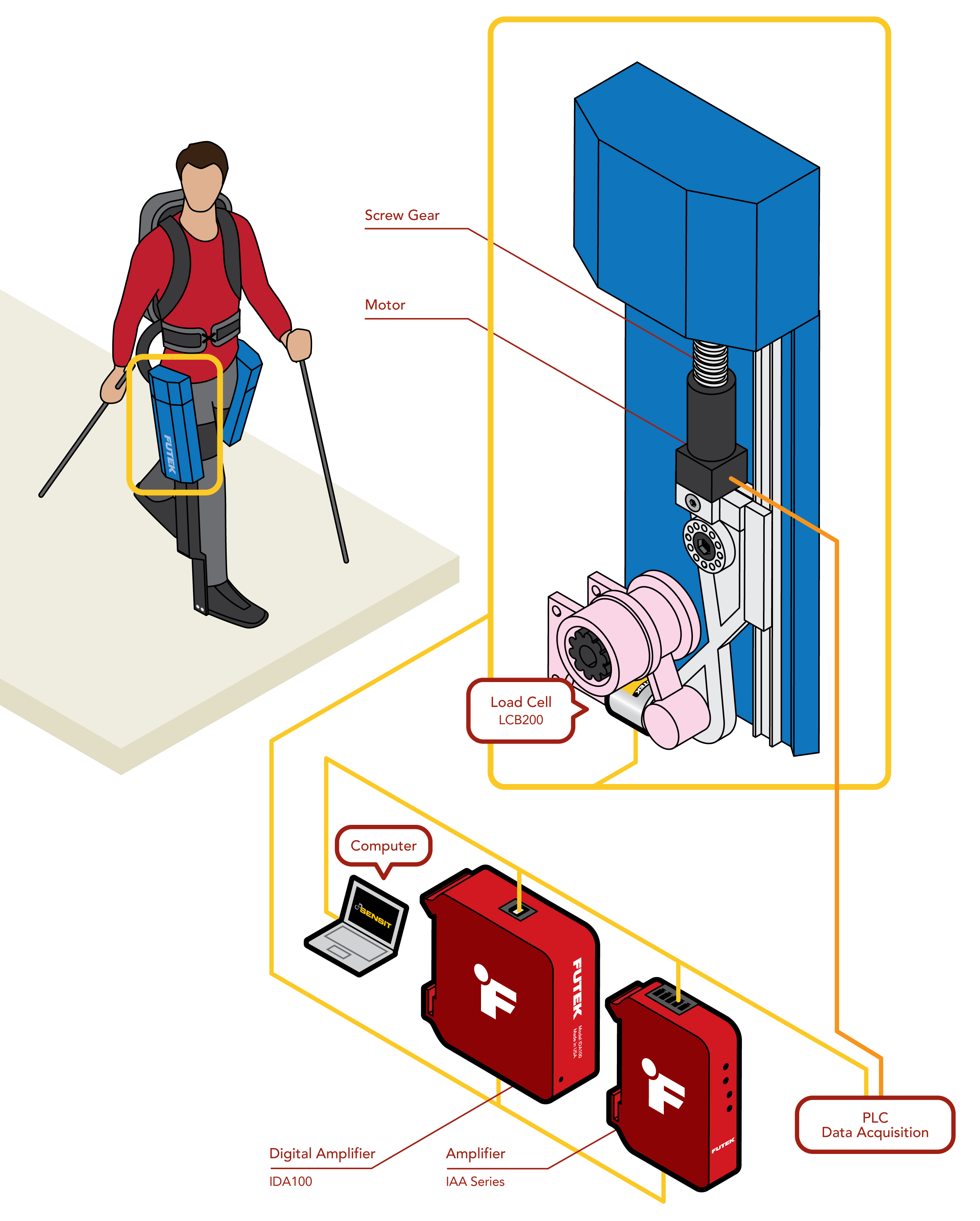
How it Works
FUTEK sponsored their exoskeleton by providing our LCB200 load cells, which were installed in specialized fixtures IHMC designed, enabling the system to receive accurate force feedback from the motors and closing the control loop, all while allowing the sensor to safely rotate.
A LCB200 is installed in a specialized fixture attached to the motor, allowing it rotate like a human joint, minimize extraneous loads, and provide accurate load data.
As the motor operates, it applies force to the joint, rotating it. This force is measured by the LCB200.
The mV/V signal from the LCB200 is sent to the IAA series analog amplifiers or IDA100 digitally configurable amplifier.
The amplified signal is sent to the exoskeleton’s control system, using the amplified load cell output to close the loop and drive the exoskeleton’s motors.
With the IDA100, amplifier output can be simultaneously monitored and adjusted on a Windows PC with FUTEK’s SENSIT™ software while providing high speed, amplified, analog output.
Products in Use
Six FUTEK LCB200 In Line Rod End Tension and Compression Load Cells paired with Analog Amplifiers (IAA series or IDA100)


Contact Us
Please Contact Us with questions.
Spinal cord injuries (SCI) often leave the patient with little to no ability to ever walk again. The Institute for Human and Machine Cognition (IHMC) aimed to help solve that with a powered bionic exoskeleton at the 2016 Cybathlon in Zurich, Switzerland. Their ingenious exoskeleton suit, named Mina v2, utilizes power actuators that strap to an individual’s legs, moving their hip, knee, and ankle joints, allowing an individual to walk unassisted.
Watch this video and learn directly from IHMC specialists how FUTEK Load Cell and Amplifiers are used to measure the actuator forces in the powered exoskeleton via a closed-loop control system for precise force control.